|
(li��n)ϵ��ʽ |
| �Ԓ(�Ј�(ch��ng)��):0517-86851868���� |
| �������������� 0517-86882048 |
| �������������� 0517-86881908 |
| ������(��չ��):0517-86882683 |
| ����:0517-86851869 |
| ��(ji��)�����̄�(w��)(li��n)ϵ�Ԓ: �ν�(j��ng)��:13655238295 �o(j��)��(j��ng)��:18015196880 |
| �]��:211600 |
| �W(w��ng)ַ:http://www.zqyex.cn/ |
| ������ http://www.sukeyb.com/ |
| E-mail:china-suke@163.com |
| sukeyb@163.com |
| ��ַ:���Kʡ����h���I(y��)�@�^(q��)�h(hu��n)���� ·269̖(h��o) |
| ���F(xi��n)�ڵ�λ�� > ���(y��) > �ИI(y��)�� > �}��(d��ng)����(du��)�u������Ӌ(j��)��Ӱ��c��Q���� |
| �l(f��)���r(sh��)�g��2015-12-17 |
|


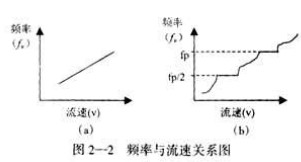
 ��(sh��)��n0��ģ������ֵ��fs��N���l�ʷֱ��ʣ�Q���x�������l���c��̖(h��o)��ֵһ�댦(du��)��(y��ng)���l�����ȵı�ֵ��ͨ��ȡ��(j��ng)�(y��n)ֵQ��30���O(sh��)�ɘ�1024�c(di��n)��׃�Q���l������õĔ�(sh��)��(j��)��512�c(di��n)����6�ν�����ģ�壺��1��0��13����2��14��27����3��28��56����4��57��112����5��113��225����6��226��510��ģ������ֵ�քe��10��20��40��80��160��320���ģ�2ģ���_ʼ��ģ������c(di��n)������ֵ����2��ƽ������ģ��ĽK�c(di��n)������ֵ����2��ƽ������
��(sh��)��n0��ģ������ֵ��fs��N���l�ʷֱ��ʣ�Q���x�������l���c��̖(h��o)��ֵһ�댦(du��)��(y��ng)���l�����ȵı�ֵ��ͨ��ȡ��(j��ng)�(y��n)ֵQ��30���O(sh��)�ɘ�1024�c(di��n)��׃�Q���l������õĔ�(sh��)��(j��)��512�c(di��n)����6�ν�����ģ�壺��1��0��13����2��14��27����3��28��56����4��57��112����5��113��225����6��226��510��ģ������ֵ�քe��10��20��40��80��160��320���ģ�2ģ���_ʼ��ģ������c(di��n)������ֵ����2��ƽ������ģ��ĽK�c(di��n)������ֵ����2��ƽ������