ժҪ:���˸����u������Ӌ(j��)������,�����һ�N���ڿ������V���Ĝu����̖(h��o)̎������������(j��)�u����̖(h��o)�����c(di��n),�O(sh��)Ӌ(j��)��һ��(g��)���Ԝu����̖(h��o)ģ�͡��Y(ji��)��ģ�������͵����㷨,ͨ�^�����������V�����㷨��ԭ�����P(gu��n)�I����(sh��),���M(j��n)�������V�����㷨��ͨ�^����ģ�M�͌�(sh��)�H������(sh��)�(y��n)�(y��n)�C��������ķ���,���c���������M(j��n)���˱��^����(sh��)�(y��n)�Y(ji��)������,������ķ����������m��(y��ng)�V�������ɔ_�����͞V���ٶȵă�(y��u)�c(di��n)��
0����
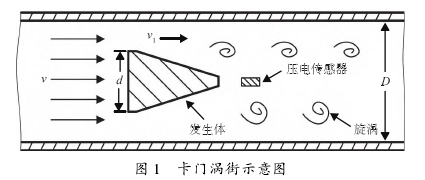
�����u������Ӌ(j��)����һ�N���(d��ng)������Ӌ(j��),���Б�(y��ng)�÷����V���y(c��)�����|(zh��)���ߜء��߉��ȃ�(y��u)�c(di��n)�����ЏV韵İl(f��)չǰ�����u������Ӌ(j��)�������w���(d��ng)��ԭ���(l��i)�y(c��)����������(d��ng)���wͨ�^һ��(g��)��ֱ���õķ����������u�l(f��)���w�r(sh��),�l(f��)���w�ɂ�(c��)��(hu��)�a(ch��n)�����Ž��e(cu��)���е����u,���Q�鿨�T�u��,��D1��ʾ���l(f��)���w�đ�(y��ng)���͉�늂����������u�a(ch��n)���ĉ������D(zhu��n)�Q��늺���̖(h��o)��늺���̖(h��o)��׃���l���c���u�Įa(ch��n)���l��-�¡�
�u����̖(h��o)�������ɂ�(g��)���c(di��n)��
1)��늂�����ݔ����늺���̖(h��o)QH�M������Ҏ(gu��)��,��ʽ(1)��ʾ
QH=γρƒ2sin(2πƒt+φa)(1)
����ʽ��:γ�鉺늂�������ϵ��(sh��),ρ�����w�ܶ�,ƒ��u���l��,φa���ʼ��λ��
2)�ڜu������Ӌ(j��)��,늺ɷŴ���һ�����ڌ�������ݔ����늺���̖(h��o)�D(zhu��n)�Q��늉���̖(h��o)��늉���̖(h��o)�Ǵ�̎����ԭʼ��̖(h��o),��늺���̖(h��o)һ�Ӟ����Ҳ���ʽ����(d��ng)���w�ܶȺͰl(f��)���w�Č��Ȟ�̶�ֵ�r(sh��)���u����̖(h��o)�ķ�ֵ�c�l�ʵ�ƽ��������,��ʽ(2)��ʾ
��∞ƒ2(2)
ʽ��:����u����̖(h��o)�ķ�ֵ��
�������ڜu������Ӌ(j��)�Ă������������(d��ng)�͂�����,�������ܵ����(d��ng)�ɔ_���@��(du��)�u������Ӌ(j��)�Ĝy(c��)�����Ⱥ͜y(c��)�������кܴ��Ӱ푡����ڜu����̖(h��o)�ķ�ֵ�c�l�ʵ�ƽ�������ȣ��ڸ���������̖(h��o)������ȴ�,��̖(h��o)����Ӱ�С;�ڵ���������̖(h��o)�������С,��̖(h��o)����Ӱ푴�,��������̖(h��o)�z�y(c��)���y�ȡ���(gu��)��(n��i)�ⱊ���W(xu��)�ߌ�(du��)�@һ���}�M(j��n)�����о�(2-3]�������(l��i)���������V������Ҳ�_ʼ����(y��ng)���ڜu������Ӌ(j��)����̖(h��o)̎���С�
�����������V���ǿƌW(xu��)��R.E.Kalman����1960�������һ�N�m�����xɢ�S�C(j��)��ƽ��(w��n)ϵ�y(t��ng)���(y��u)��Ӌ(j��)�㷨�������ھ����xɢϵ�y(t��ng),���(y��u)�V����Փ�c��B(t��i)���g˼����Y(ji��)�ϡ����_����[4]ᘌ�(du��)���ʽ�u������Ӌ(j��)���ɔ_�Բ��ȱ�c(di��n),����˻��ڶ��������ںϵĜu����̖(h��o)�z�y(c��)������ԓ����ͨ�^�o(w��)�E�������V���㷨������������y(c��)�����g�wǰ��������εĜu����̖(h��o)�l���M(j��n)���ں�,����(qi��ng)�ˉ��ʽ�u������Ӌ(j��)�Ŀ�������,��Ч����˔�(sh��)�֎�ͨ�V�����Ĝy(c��)�����ȡ�Shao��[5]ᘌ�(du��)�u������Ӌ(j��)�����һ�N���ڷֶο������V���Ĕ�(sh��)����̖(h��o)̎��������ԓ�������ȷ���˲�B(t��i)�_��������,������(sh��)�W(xu��)ģ��,Ȼ����������̖(h��o)��(sh��)��(j��)���ҵ����Џ�(qi��ng)˲�B(t��i)�_���Ĕ�(sh��)��(j��)��,����(du��)��(sh��)��(j��)���M(j��n)�п������V��,�Խ���˲�B(t��i)�_���Ĺ��ʡ�
�������������һ�N���ڜu����̖(h��o)ģ�͵Ŀ������V������̖(h��o)̎������(���º�(ji��n)�Q��������")������,����(j��)��ԭ���;��Ծ�ꇌ�(du��)�Ǿ��ԵĜu����̖(h��o)�M(j��n)�о��Ի�̎��������ģ��;���,����(j��)�u����̖(h��o)�ķ��l�P(gu��n)ϵ,��ʼ���u����̖(h��o)ģ���l��;�ٴ�,���V�����ݔ���l��������һ��(g��)ѭ�h(hu��n)�ij�ʼ�u��ģ���l���M(j��n)�е�����ģ������,ֱ��ݔ���l���cģ���l�ʵ��`���ڜu������Ӌ(j��)���S���`�����(n��i)��ֹ;���,ͨ�^���挍(sh��)�(y��n)�͌�(sh��)����(sh��)�(y��n)��(du��)ԓ�����M(j��n)�����(y��n)�C��
1�������V��ԭ���͜u��ϵ�y(t��ng)ģ��
1.1�������V��ԭ��
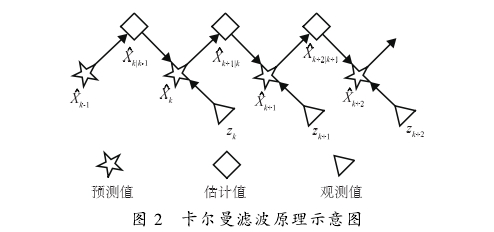
�����������V����һ�N���þ���ϵ�y(t��ng)��B(t��i)����,ͨ�^ϵ�y(t��ng)ݔ�˵��^�y(c��)��(sh��)��(j��)��(du��)ϵ�y(t��ng)��B(t��i)�M(j��n)���(y��u)��Ӌ(j��)���㷨�������ԭ������:���O(sh��)��һ��(g��)�xɢ�ľ���ϵ�y(t��ng)Xk,ͨ�^k-1�r(sh��)�̵��(y��u)��Ӌ(j��)Xk-1�õ�k�r(sh��)�̵��A(y��)�y(c��)ֵXk|k-1������k�r(sh��)�̵��^�y(c��)ֵZk�����A(y��)�y(c��)ֵ���Ķ��õ�h�r(sh��)�̵��(y��u)��Ӌ(j��)Xk���D2�@ʾ�˿������V��ԭ����
������(du��)�ڛ]�п���ݔ�˵�ϵ�y(t��ng),�������V���㷨�Ġ�B(t��i)���̺��^�y(c��)���̿���ʽ(3).ʽ(4)��ʾ
Xk+1=AXk+Bwk(3)
Yk+1=HXk+1+Dʋk+1(4)
����ʽ��:Xk��n�S�Ġ�B(t��i)׃����k�r(sh��)�̵�ֵ,wk��p�S���^����,Yk+1��m�S���^�y(c��)׃��,ʋk+1��m�S���^�y(c��)��,A��׃��Xk�Ġ�B(t��i)�D(zhu��n)�ƾ��,H��ϵ�y(t��ng)����(sh��)���,B���^������ϵ��(sh��)���,D���^�y(c��)����ϵ��(sh��).��ꇡ�wk��ʋk+1�Ǿ�ֵ��0�һ������P(gu��n)�ĸ�˹���������y����,��ʽ(3)��ʽ(4)��(g��u)����ϵ�y(t��ng)ģ�Ͳ������u����̖(h��o)��������
1.2�u��ϵ�y(t��ng)ģ��
�������ڜu����̖(h��o)�ǷǾ������Ҳ���̖(h��o),���M�㿨�����V��ϵ�y(t��ng)ģ�͵ľ���Ҫ��,���ܳɞ鿨�����V���㷨��ϵ�y(t��ng)ģ��,��Ҫ������ԭ���;��Ծ�ꇌ�(du��)�u����̖(h��o)�M(j��n)�о��Ի�̎��,���w�ƌ�(d��o)�^�����¡�
�������O(sh��),�u����̖(h��o)�Ĕ�(sh��)�W(xu��)ģ����ʽ(5)��ʾ:
s(t)=asin(2πƒt)(5)
��ô������A��(d��o)��(sh��)������ʽ(6)��ʾ:
s"(t)=-4π2aƒ2sin(2πƒt)(6)
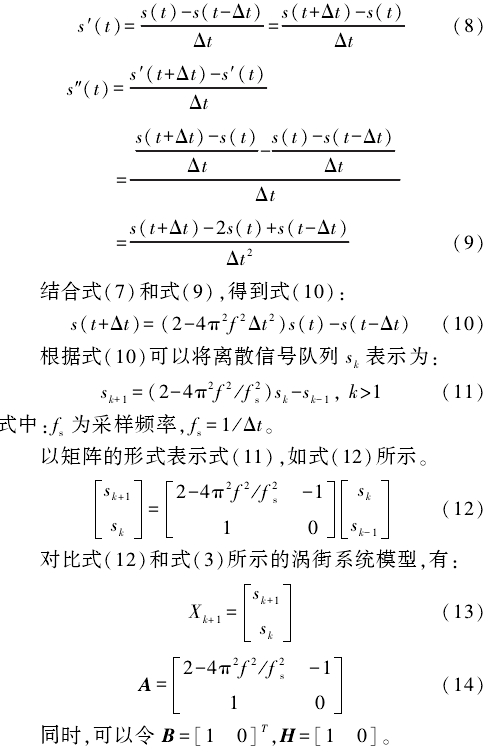
��ʽ(5)����ʽ(6),�õ�ʽ(7):
s"(1)=-4π2ƒ2s(t)(7)
��������(j��)��(d��o)��(sh��)�Ķ��x,��(d��ng)t>△t��△t��0�r(sh��),�ɵ�ʽ(8):
2�㷨��(sh��)�F(xi��n)
2.1�㷨�O(sh��)Ӌ(j��)
�����������V�������^�y(c��)��(��(sh��)�H��̖(h��o))��(du��)�A(y��)�y(c��)׃��(ģ����̖(h��o))�M(j��n)���������V���Y(ji��)�����ڌ�(sh��)�H��̖(h��o)��ģ����̖(h��o)֮�g��ͬ��,�V�������̖(h��o)�l��Ҳ���ڌ�(sh��)�H��̖(h��o)�l�ʺ�ģ����̖(h��o)�l��֮�g�����,�O(sh��)Ӌ(j��)��һ�N���ڜu��ģ�͵Ŀ������V���㷨,�Ե����ķ��������u����̖(h��o)���l�ʡ�
��������,����(j��)�u����̖(h��o)�ķ��l�P(gu��n)ϵ�O(sh��)�ó�ʼϵ�y(t��ng)ģ���l�ʡ�����ʽ(2)��(du��)Һ�w���|(zh��)�ܵ��ϲɼ����Ĝu����̖(h��o)�ķ�ֵ���l���M(j��n)�ж��ζ��(xi��ng)ʽ�M��,�õ���Һ�w���|(zh��)��50mm�ڏ��u������Ӌ(j��)��̖(h��o)�ķ�ֵ���l�ʵ��P(gu��n)ϵ,��ʽ(15)��ʾ��
��=1.789x10-5ƒ2(15)
����ͬ��,��(du��)�ɼ����Ě��w��(sh��)��(j��)�M(j��n)�ДM��,���Եõ����w��̖(h��o)�ķ�ֵ�c�l�ʵ��P(gu��n)ϵ����ʽ(16)��ʾ
��=2.622x10-8ƒ2(16)
������ƒm��ʾ��B(t��i)ģ���l��,��ƒmax,��ʾ�u����̖(h��o)������l��,��ƒm=ƒmax���@���O(sh��)�õ�Ŀ���ǜp�ٵ����Δ�(sh��)��Ӌ(j��)����������,ʽ(3)�е�ϵ��(sh��)���A����ʽ(17)��ʾ��

������(d��ng)���ٵ͕r(sh��),�u����̖(h��o)������,���^��,�����ϵ��(sh��)D�^��;��֮,��ϵ��(sh��)D�^С���ɴ˿�Ҋ,��ϵ��(sh��)D�c�u���l��ƒ�ɷ��ȡ���Ό�(sh��)�(y��n)��(sh��)��(j��)��������,��(d��ng)D���^�y(c��)��̖(h��o)��max�c�u����̖(h��o)ģ�ͷ�ֵ��֮�ȕr(sh��),�õ�����������ÞV��Ч������ʽ(18)��ʾ��
����ʽ��:ϒ�鲻ͬ���|(zh��)�з��l�P(gu��n)ϵ��ϵ��(sh��)��
������50mm.�ڏ��ܵ���Һ�w���|(zh��)����,��(du��)��ͬ�����c(di��n)�ɼ��Č�(sh��)�(y��n)��(sh��)��(j��)�M(j��n)����ϵ��(sh��)D����̖(h��o)�l��ƒ�������M�ϣ��M�ϵõ����P(gu��n)ϵʽ��ʽ(20)��ʾ��
�������,��(du��)�(y��u)��Ӌ(j��)Xk�������M(j��n)�нy(t��ng)Ӌ(j��)����,ȥ���M��(n��i)�sɢ��(sh��)��(j��)��,ȡƽ��ֵ�ĵ���(sh��)����u����̖(h��o)���l��,�Եõ����l�ʞ�u����̖(h��o)����ϵ�y(t��ng)ģ���l��,��(du��)ԭʼ��̖(h��o)�M(j��n)�п������V��������ԭʼ��̖(h��o)�Мu����̖(h��o)���l�ʱ��ֲ�׃,�V����ݔ���l�ʽ��ڜu����̖(h��o)�l�ʺ�ģ���l��֮�g���V����ݔ���l�ʺ�ģ���l���ڵ�������u�Ք����u����̖(h��o)�l�ʡ���(d��ng)ݔ���l���cģ���l�ʵ�����(du��)�`�����A(y��)�O(sh��)ֵ�ԃ�(n��i)�r(sh��),ֹͣ��������Kݔ���u���l�ʡ�
2.2�㷨����
���w���㷨���E�������¡�
���Eһ:�ɼ�һ�M�^�y(c��)��̖(h��o)����Yk(k=1,2,3,��,N),��(du��)�������V������(sh��)B��H��Q��D��ʼ�������M�ϳ�R�cƒ���P(gu��n)ϵʽ��
���E��:����,����(j��)�ڵ����в���׃���Ġ�B(t��i)ģ���l��ƒm.��(du��)�D(zhu��n)�ƾ��A���^�y(c��)���f(xi��)����R�M(j��n)�Ѕ���(sh��)����;Ȼ��,��(du��)�^�y(c��)��̖(h��o)Yj�M(j��n)�Р�B(t��i)�A(y��)�y(c��),��ݔ���(y��u)��Ӌ(j��)��̖(h��o)����Xk(h=1,2,3,,N)��
���E��:ͨ�^�}�_���D(zhu��n)���η�����(du��)�(y��u)��Ӌ(j��)��̖(h��o)�����M(j��n)���l��Ӌ(j��)�㡣�O(sh��)�÷��D(zhu��n)���ֵA(ch��)thr�ͷ��D(zhu��n)���ֵ-Ar,��(d��ng)��̖(h��o)�ɵ����������Athr�r(sh��),��ݔ������̖(h��o)�ƽ�øߡ���(d��ng)��̖(h��o)�ɸ�����½���-Athr�r(sh��)����ݔ������̖(h��o)�ƽ�õ�,��Kݔ���}�_��̖(h��o)����Z(h=1,2,3,,N)��ͨ�^�}�_Ӌ(j��)��(sh��)����ֱ������}�_��̖(h��o)Zk����������T;(i=1,2,3,.,M),Ӌ(j��)�����������Ti,��ƽ��ֵTavg,�õ��V��ݔ����̖(h��o)��ƽ���l��ƒout=1/Tavg��
���E��:ݔ����̖(h��o)�l��ƒout�͠�B(t��i)ģ���l��ƒm���M��Iƒout-ƒmI��ƒmx1%,�t���D(zhu��n)�����E�塣��lƒout-ƒm|>ƒmx1%,��ƒout��ƒmin,�t��fm=fe,�����D(zhu��n)�����E��;��t,��(y��ng)ֹͣ����������ݔ����һ݆��̖(h��o)̎���õ��Ĝu����̖(h��o)�l��,���D(zhu��n)�����Eһ��
���E��:ݔ����̖(h��o)��ֵA(ch��)out�͔M�ϵĜu����̖(h��o)��ֵ�����P(gu��n)ϵ���M��|Aout-��l<��x10%,�t�Д���u����̖(h��o)�l��ݔ���l��ƒout,�����D(zhu��n)�����Eһ;��|Aout-��|�ݦ�X10%,�t�J(r��n)�����������(d��ng)���l��,���D(zhu��n)�����E����
���E��:��ƒm=ƒmin9�r(sh��),�^�m(x��)���������u����̖(h��o)�l�ʡ���(d��ng)ƒm��ƒmin�r(sh��),���D(zhu��n)�����E������ݔ���l��ƒout,�Ե������l��,�t�؏�(f��)���E��;��t���D(zhu��n)�����E�ġ���(d��ng)ƒm<ƒmin�r(sh��),��(y��ng)ֹͣ������ݔ����һ�����_�Ĝu����̖(h��o)�l��,�����D(zhu��n)�����Eһ��
3��(sh��)�(y��n)�(y��n)�C
�������(y��n)�C����������Ч�ԡ��y(c��)�����ȺͿ��ɔ_��,���÷�����̖(h��o)�͌�(sh��)����̖(h��o)�ڲ�ͬ������ͬ���|(zh��)���M(j��n)�Ќ�(sh��)�(y��n)�y(c��)ԇ��
3.1���挍(sh��)�(y��n)
�������Ď��йܵ����Ĝu����̖(h��o)ģ���ǻ���ţ���W(xu��)�@�õĜu����̖(h��o)�����V�ܶ�,Shao���ڴ˻��A(ch��).�ϼ��˕r(sh��)����Ҏ(gu��)�ɺͷ���˥�p�F(xi��n)�����Ĝu����̖(h��o)�M(j��n)�з���ģ�ͷ�������(sh��)�W(xu��)ģ�ͱ��_(d��)ʽ��ʽ(26)��ʾ��

����ʽ��:��0��u����̖(h��o)��ֵ;f��u����̖(h��o)�l��;Kƒ��K���քe���{(di��o)�l�`���Ⱥ��{(di��o)���`����,K,��u����̖(h��o)�l���c�ɘ��l�ʵı�ֵ,�O(sh��)K��=1;δ��(t)��δƒ(t)�քe���˹�����͜u����̖(h��o)���Ⱥ��l�ʵIJ���(d��ng)ƫ��;n(t)���������ɔ_,�������l��ʎ�ɔ_�����l�ɔ_���������(d��ng)�ɔ_���S�C(j��)�ɔ_��
����������ģ����,���˾��ж���(g��)�����ɶ����Ꮧ��ϵ�y(t��ng)���ԽM�����Ե�˲�B(t��i)�_�����(d��ng)�ɔ_ģ��,��ʽ(27)��ʾ��

����ʽ��:n��ϵ�y(t��ng)�����ɶ�,ȡn=6;ne(t)���˹����;ξi������ϵ��(sh��);ƒi�����(d��ng)�l��;Φi���ʼ��λ;��i��bi��ξi�鳣��(sh��),ȡֵ�������P(gu��n)�īI(xi��n)��
3.1.1�������ķ����(y��n)�C
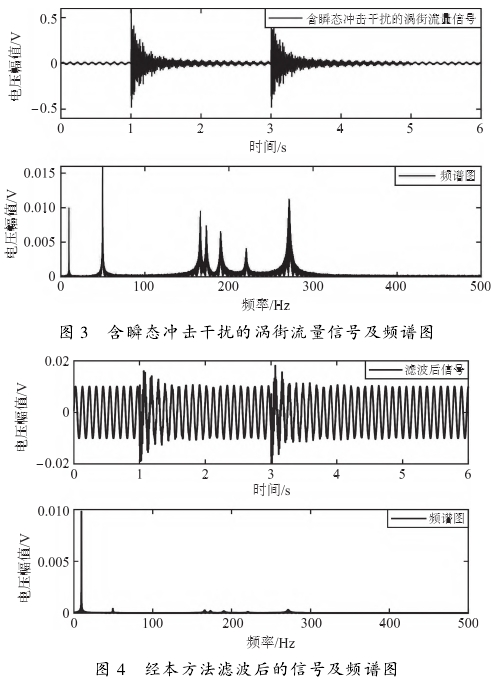
��������,�(y��n)�C��������(du��)˲�B(t��i)�_���ĞV��Ч�����u����̖(h��o)����ģ�͵IJɘ��l�ʞ�10kHz���ɘӕr(sh��)�g��6s,����ɴ�˲�B(t��i)���(d��ng)�ɔ_,�ܵ�ֱ���քe��25mm;��50mm,���w���|(zh��)����w��Һ�w���Թ���25mm���l�ʞ�9.54Hz��Һ�w���|(zh��)��̖(h��o)����,����˲�B(t��i)�_���ɔ_�Ĝu��������̖(h��o)���μ����l�V�D��D3��ʾ��(j��ng)�^������̎����IJ��μ��l�V�D��D4��ʾ���ĈD3�͈D4�п��Կ���,˲�B(t��i)�_���ɔ_����Ч�V���ˡ�
3.1.2��������(du��)�ȷ��挍(sh��)�(y��n)
�������������c���y(t��ng)�������V����������(j��ng)�(y��n)?z��i)��B(t��i)�ֽⷽ��(EMD����)�M(j��n)�з��挍(sh��)�(y��n)��(du��)�ȣ���Һ�w���|(zh��)�еķ��挍(sh��)�(y��n)�Y(ji��)�����ڱ�1,�ښ��w���|(zh��)�еķ��挍(sh��)�(y��n)�Y(ji��)�����ڱ�2��
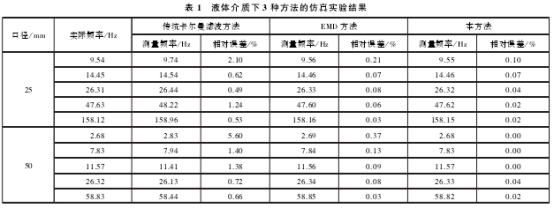
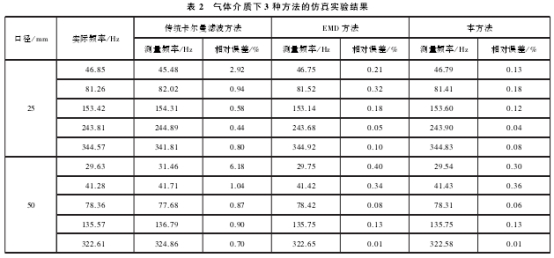
�����ڱ�1����2�У���(sh��)�H�l����ָģ�M�u����̖(h��o)���l��,����(du��)�`����ָ��(sh��)�y(c��)�l���c��(sh��)�H�l�ʵ��`��^��(du��)ֵ�c��(sh��)�H�l�ʵı�ֵ,��ʽ(28)Ӌ(j��)�㡣���п��Կ���,�������Ĝy(c��)������(du��)�`��С�ڂ��y(t��ng)�������V��������EMD�����Ĝy(c��)������(du��)�`��,�ڵ���������r�£���y(c��)�����`�(y��u)��(sh��)�������@��

ʽ��:Er������(du��)�`��,ƒmea�錍(sh��)�y(c��)�l��,ƒa�錍(sh��)�H�l�ʡ�
3.2��(sh��)����(sh��)�(y��n)
�������IJ������Ϻ��|(zh��)���O(ji��n)���z�(y��n)���g(sh��)�о�Ժ�ṩ���Ƅ�(d��ng)ʽ���w������(bi��o)���b���M(j��n)�К��w���|(zh��)�µķ��挍(sh��)�(y��n)ԓ�b���ɱ��z�x������(bi��o)��(zh��n)�x�����L(f��ng)�C(j��)�����ؙC(j��)����(w��n)�����׃�l���M��,���(bi��o)������������0.5~270m3/h,�y(c��)������(du��)�U(ku��)չ���_���Ȳ�����0.63%,��(w��n)���Ժ��؏�(f��)�Ծ������^0.3%��
�������IJ������Ϻ��|(zh��)���O(ji��n)���z�(y��n)���g(sh��)�о�Ժ�ṩ���Ƅ�(d��ng)ʽҺ�w������(bi��o)���b���M(j��n)��Һ�w���|(zh��)�µķ��挍(sh��)�(y��n)��ԓ�b���ɱ��z�x������(bi��o)��(zh��n)�x����ˮ�á����ؙC(j��)����(w��n)����׃�l���M�ɡ���(bi��o)���b�ÿ��ṩ���Ʒ�(w��n)��������,ͨ�^��(bi��o)���r(sh��)�g��(n��i)����Ӌ(j��)�������(y��n)�C�b�õľ��ȿ��_(d��)0.001m3/h��
������(sh��)����(sh��)�(y��n)�Ĺܵ��ڏ���50mm,���w���|(zh��)����w��Һ�w,�ɘ��l�ʞ�10kHz,�ɘӕr(sh��)�g��6s��ÿ�M��(sh��)�(y��n)�xȡ10��(g��)�����c(di��n),��Ҫ������Ӱ��^��ĵ�������̖(h��o)����3�ͱ�4�քe�����50mmҺ�w��50mm���w��3�N������̎���Y(ji��)�������Ќ�(sh��)�H�l�ʞ��(bi��o)���b���Ϙ�(bi��o)��(zh��n)������̖(h��o)�l�ʡ�
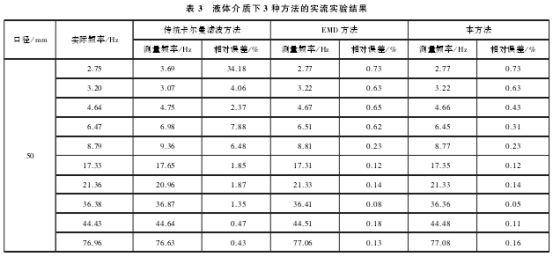

������(sh��)����(sh��)�(y��n)�Y(ji��)������,����������ɷN����,������.���и�С���`�
4�Y(ji��)�Z(y��)
�������������һ-�N���ڜu����̖(h��o)ģ�͵Ŀ������V���Ĝu������Ӌ(j��)��̖(h��o)̎�����������ȷ����˿������V���㷨��ԭ��,������ԭ���;��Ծ�ꇽ����u����̖(h��o)�ľ���ϵ�y(t��ng)ģ�͡�ģ�͵ij�ʼ�l���ɜu����̖(h��o)������l�ʛQ��,������㷨��Ӌ(j��)��Ч�ʡ�����Y(ji��)��ģ�������͵����㷨��(du��)�������V���㷨�M(j��n)�и��M(j��n),ͨ�^��������ʹ�V���Y(ji��)����u�ӽ��u����̖(h��o)����(j��ng)�(y��n)�C,ѭ�h(hu��n)�����Δ�(sh��)һ����3~10��֮�g,��(f��)�s�ȵͣ�푑�(y��ng)�ٶȿ졣���������ѭ�h(hu��n)�O(sh��)�ýKֹ�l�����Д��Ƿ��ҵ��u����̖(h��o),��ͨ�^�u����̖(h��o)�������O(sh��)��߅��l��,��ֹ�����^�̰l(f��)ɢ����(sh��)�F(xi��n)�˿������V���������m��(y��ng)�V�����ܡ����ͨ�^���挍(sh��)�(y��n)�͌�(sh��)����(sh��)�(y��n)Ӌ(j��)����̖(h��o)�l�ʺ�����(du��)�`��,���c���y(t��ng)�Ŀ������V��������EMD�����M(j��n)�б��^����(sh��)�(y��n)�Y(ji��)������,�c�����ɷN�������,���᷽�����Мy(c��)�����ȡ������ԡ��u����̖(h��o)�ķ�ֵ�c�l�ʵ��P(gu��n)ϵ�DZ����㷨��ʼ����(sh��)��ݔ���l�����O(sh��)Ӌ(j��)����(j��),��ϵ��(sh��)�������w�ضȺ�̽�^�p�ĵ�Ӱ푣��Ķ�Ӱ��㷨���ȡ����,�����O(sh��)Ӌ(j��)���㷨�m���ڵ����w�ܶȡ����g���͜ز���(d��ng)�Ĉ�(ch��ng)�ϡ�
���ā�(l��i)Դ�ھW(w��ng)�j(lu��),�����֙�(qu��n)(li��n)ϵ���h����