ժҪ��ͨ�^�о�ճ�Ȍ����������������y����Ӱ�,�\�Ì���ֶ�,�y��ճ�Ȟ�10~50mm³/s��.4050���՝����͌�����������������Ӱ��`��s��10%���ҡ��Y�ϸ���������������߅�����Փ�c�Ȳ����w������r,�\��CFDܛ������,��ճ�Ȍ�DN40mm��������������Ӱ��`�������5%�ԃȡ��������ĽǶȷ�����������������ճ��Ӱ�Ҏ�ɼ���C��,����ģʽ������ģ��,���Ժ������������ķ����ṩ�˽��b���á�
���������������������Ը����ڴ�ֱ�F�ι����S������׃��������,��׃����֮�g����ͨ��e���M�Мy�����w�e�����x��,�ַQ�D��������������׃��e�����������������������������y����.�������ӽ��|�ܶȺ�ճ��Ӱ��^������һЩ�W�����˴���ԇ��о�2.3,ԇ�D�pС�@�ɂ����挦�y�����ȵ�Ӱ푡��~����ͨ�^����ճ�Ȍ��õ������c��ͬ���Ӹ߶�֮�g���Pϵ�����ͷ�ţ�D���w��ճ��Ӱ�Ҏ�ɡ�
����4��ճ�ȹ�24�������c�Č������,Ȼ��ͨ�^��ֵ��������˃ɂ�ճ�ȹ�12�������c��������r,����������ģ�ͽY����������ɂ�ճ��12�������c�ķ���ģ��,�c����,�����`����5%�ԃȡ��ɴ˿��Y��DN40mm�F�ܸ���������������ճ�ȷ���ģ��,ԓģ�ͱ����Ժ������о���������������ճ��Ӱ푙C���̓����pճ���ӵĽY����
1����о�
�����������|��4050���՝�����,���ճ�ȷ�����10~50mm2/s�����÷Q�ط��˶���������.��,����ϵ�y����׃�l������ʽ,�b�þ��Ȟ�5%0��ϵ�y�����O���Ĺ�������������ֵ,��׃�l�������ͱõ�ݔ�����ʡ�ԓ�b�ò��ø�׃���|�ضȵķ�ʽ��׃���|ճ��ֵ,������һ�������ļӟ����sϵ�y,���ܵ����O���МضȂ�����,�S�r�ɼ������|�ض�,ͨ�^�ض��c���|ճ�ȵČ����Pϵ,�o�������|��ճ��ֵ������b����D1��ʾ��
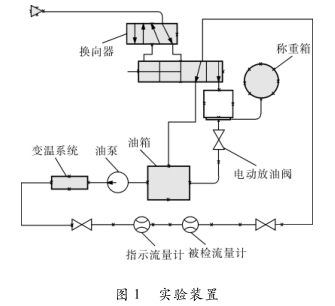
�����÷Q�ط��ڿ�׃ճ�������˜��b���ϙz��ԓ����������,�z���^�̞�:�{��׃�l��,ʹ�˶�ܛ.���y������늉�ֵ�քe��������������9.0mi��0.2qxomas��0.4qxomas��0.6qxomas��0.8qqxomas��qxomas6���̶�ֵ��,ӛ䛘˜ʱ������ͽ��|�ضȡ����ÿ̶ȓQ�㹫ʽ�����P��ˮ�̶�ֵ�Q�㵽���H���w������ֵ��
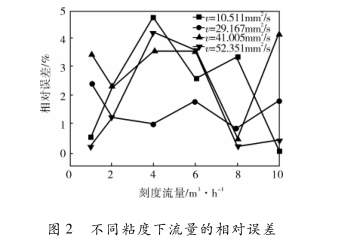
���������̷���1~10m³/h�����ȵȼ�1.5����DN40mm���������������M�Ќ���о���qxo�ǿ̶�����,qvomax��������������������,qv�nj��H����,δ1�ǝM���`��,δ1=|(qy0-qy)1/qxomax100%,����Ҋ��1��

�ı�1���Կ���:
a.
ͬһճ�����w,�M���`���S�������������������߅�����Փ,ͬһ�Nճ�ȵ����w,��.��������r,���ӱ�����߅��ӵĺ�ȕ�׃��,��߅��Ӄ����ٵ��ٶ��ݶȕ�׃��,�Ķ����¸���.���ܵ�ճ���Б���׃��,��������Խ��,�M���`��.Խ��
b.��ͬճ�ȵ�ͬһ�N���w,��ͬһ�����£��M���`���S��ճ�ȵ������������߅�����.Փ,��ͬճ�ȵ����w���^���������������r,ճ��Խ��,߅��Ӻ��Խ��,���w����Ч��ͨ��e��ԽС�����⣬ճ�ȵ������¸����ܵ���ճ���Б���׃�����,��횜pС���������������������.������ʹ����̎��ijһ�߶ȕr,�S������ƽ�⡣
2�����о�
2.1ܛ������
����Ӌ�����w���W(ComputationalFluidDynam-ics,CFD)������Ӌ��C����������w����Ҏ�ɵĿ��Ʒ��̽M���g,�漰�����w���W��Ӌ�㷽����Ӌ��C�D��̎���ȼ��g��
2.2����ģ�͵��x��
����SSTk-ɷģ����MenterFR����Ę˜�k-ɷģ�͵�һ��׃��8��ԓģ�ͺϲ��ˁ�Դ��ɷ�����еĽ���Uɢ,��������ճ�ȵ�Ӌ�㿼�]���������������Ă�����ԓģ�Ϳ����^�õ�Ӌ��߅�ںͭh϶�������w�����`������r,߀�������_Ӌ��.�������ą^�����w��������r��ԓģ���ڽ������������^�˜ʵ�k-ɷģ���������ߵľ���,���������ą^���Ӌ���^�˜�k-ɷģ���и��V���đ��á�
�x��ķ�����|���\��ճ�ȷ���10~50mm2/s�ĺ��՝����ͣ�ճ��Ӱ����@��ճ�����w�������������������r,����ճ�Ե�Ӱ�,�������������������Z��Ѹ�ٜpС,���ҿ��]������.�c����U�ı���s������,ͨ�^���^,�x��SSTk-ɷģ�����鸡������������������ģ�͡�
������GAMBIT���������������������Ķ��Sģ��,�����־W��,Ȼ���ģ�͌��뵽FLUENTܛ��.��,�M������ģ�͵��O�á��˿ڗl���O�á�Ӌ��ģ���x���|�����O�ü����ӱ���ֲڶ��O�õȲ�����
2.3����Y��
������10mm²/s��50mm²/sճ�ȵ�12�������c����ģ�Ͳ��M�Д�ֵ���,�`����5%�ԃȡ�ᘌ�30mm²/s��40mm²/sճ�ȵ�12���c,��FLU-ENT��ģ�r,ֻ�ƄӸ��ӵ�λ�Ƽ���,�����ľW����ģ�K���ģ�FLUENT�е��O��ֻ��ճ��헺��˿��ٶȲ�ͬ,������ȫ��ͬ������Y������:�`.��Ҳ��5%�ԃȡ�
2.3.1�����`�����
���������������q���t�����`��δy=1(qf-qv0)I/qy0��100%,��ͬճ���������������`����D2��ʾ��
�����ɈD2��֪,��ͬճ�������õķ��������͌��H�������`���δ���^5%,�f����ֵ���潨ģ�����־W���x������ģ���Լ������ƅ����ȷ��涼�Ǻ����ġ�CFD��ֵ���������c��������Ǻ�,CFD��ֵ����ģ���܉�ܺõط�ӳ���Y.����
2.3.2�ٶ��ƈD�������
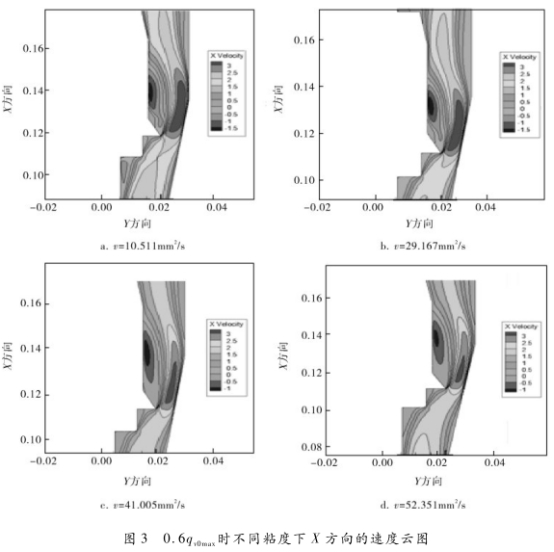
��������ֱ�^�ط�ӳͬһ�����c��ͬճ�����������������ٶȵ�׃��,�xȡ0.6qyDmax�r��ͬճ��.��X�����ٶ��M�з���,�ٶ��ƈD��D3��ʾ��
�ɈD3���Է�����:
a.��ͬһ�̶������c,X������ٶȺ��ٶ��ݶ��S�����ӽ��|ճ�ȵ�������pС��ԭ�������w��ճ��������,�Ȳ�Ħ��������,���w�˷�Ħ������������,�Ķ������pʧ����,�ٶȺ��ٶ��ݶȶ��pС�ˡ�
b.��ͬһ�̶������c,�S�����wճ���������wͨ�^�h϶������uβ���^Ӱ�׃С��ԭ�������wճ�ȜpС,�ٶ����@�pС,���Z���pС�����u.�Ă����ٶȜpС����ͬ�rճ���Б���׃�u����˥�p�ٶ�����
2.3.3�h϶�ٶȷ���
�����̶�������0.6qv0max�ķ���ģ��,���S��103.5mm̎���F�ܽ���e���̎Ҳ���ǭh϶̎����ȡ�˭h϶̎���ٶȔ�ֵ,�L��������D4��ʾ��
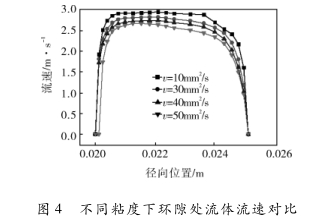
�����ĈD4���Կ������h϶̎���w���ٶ��S��ճ�ȵ�������pС��ԭ����ͬһ�̶�������,�h϶����e����ͬ��,�����w���|��ճ������,�t���.��Ħ������������,ʹ���^�h϶̎���ٶȽ��͡�
3��ֵ�����c��������
��������ĝM���`��С��5%,�������ĝM���`����11%,���߲�ͬ����Ҫԭ���:
a.���������������`�ԓ�����ͨ�^��׃�ضȁ���׃���|ճ�ȵ�,���nj���^���МضȲ��Ǻ㶨,��һ���IJ���,���Ԝض�ֵ��һ�����`��,�Ķ������ض�ȡ�õ��ܶȺ�ճ��ֵҲ���`�
b.�����ճ��ֵ�c����ճ��ֵ���`������ÿ�������c�����г̶��y�˃ɴ�,�������ճ��ֵ��ȡ���Ό���ƽ��ֵ,�O������,ÿ�������c��ճ��ֻ��һ����ֵ���@�N������Ȼ�������w�ķ���ճ�Ⱥ͌��ճ�ȴ����`�
C.���汾�������`��������B�m��,����CFD��ֵ�����Dz����xɢ�����ֶΌ������M�е���Ӌ�㡣����W���^��,�tӋ��Y���������_,���a���`��;����W���^��,��ʹ�ؔ��`������,ͬ��Ҳ�������^���`�
4�Y���Z
����ͨ�^���͔�ֵ����,���Y��ճ�Ȍ�����������������Ӱ푡�ͨ�^���Ȱl�F,��ֵ������Ը��صؿ������w�Ȳ����w��������r,���ǔ�ֵ������Ҫ���͌�������B�Ļ�������,��Ҫһ������Փ���A���������ԫ@�ô����µĵ��Y��,���Ԍ���ֵ�������錍����Ч�a�䡣
���ā�Դ�ھW�j,�����֙�ϵ���h����