ժҪ��������������Ӌ�ձ��������̿ڼ���ݽ�λ��ʽ�������z�y�C(j��)�����������ܽ��ٹܸ�������Ӌ,��(sh��)�F(xi��n)�ˌ����������_�y��������Ԕ��(x��)��Bԓ����ӋӋ��ԭ�����D(zhu��n)�Q�����O(sh��)Ӌ����̖�����ܻ�̎�����әC(j��)��(bi��o)�����`�������
1����
�������������_�y���ڹ�(ji��)�ܽ��ġ���(j��ng)��(j��)���㡢�Ԅӿ��Ƶȷ��������V����(y��ng)�á����е����������y���и�������Ӌ�����dz���Ҫ�����á�
����Ŀǰ����(n��i)���ٹܸ�������Ӌ�����M(j��n)�a(ch��n)Ʒ�͇��a(ch��n)�a(ch��n)Ʒ��,��Փ����Ҫ����(j��)w.Miler���о��ɹ���,��(sh��)�H�O(sh��)Ӌ���ֲ��ÙC(j��)е�Y(ji��)��(g��u)�M(j��n)������Ӌ��,�ɴ˶�����������IJ���,����,��Փ�ϴ���һ��ȱ��;���,�ǙC(j��)е�Y(ji��)��(g��u)�o���M(j��n)�����������_Ӌ��;����,��횸���(j��)���y���|(zh��)���ܶȡ����r�l�������������M(j��n)�����_�O(sh��)Ӌ����,�o���a(ch��n)�S��ʹ�ò��T�������㡣
2Ӌ��ԭ���c���C(j��)�O(sh��)Ӌ
2.1Ӌ��ԭ��
������D1��ʾ,���ӷ��ڴ�ֱ���F�ιܵ���,�S�����w�ٶȵ�׃���������Ƅӡ�������������������ӭ������������ճ�ԑ�(y��ng)��������,��(d��ng)�����ڴ�ֱ�����Ϻ�������r�_(d��)��ƽ���B(t��i),����̎��ijһ��(w��n)����λ�á���(d��ng)�����ٶ�׃���r,���������c���ϵ��������_(d��)��һ���µ�ƽ���B(t��i),������̎��һ���µķ�(w��n)��λ�á�
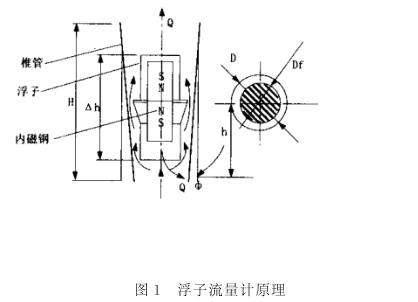
������ᘌ���������Ӌ��Փ�ƌ�(d��o)������ʽ�ķ����^����,���ļț]�вɼ{���ڵ�J.C.Whitwell��D.S.Plumb����Փ�ƌ�(d��o)�ɹ�,Ҳ�]�вɼ{�F(xi��n)����W.Miler���о��ɹ�[2�������������ʽ,��?y��n)���߶��Ǹ��?j��)��(j��ng)�䲮Ŭ�������ƌ�(d��o)�õ��ĸ��ӽ��������c���w�B�m(x��)����(li��n)��,����,Whitwell��Plumbδ���]������������ƽ���P(gu��n)ϵ,���δ�@�üȷ�ӳ���w�����ַ�ӳ�������Ե�ͨ����������;Miller�mȻ���]�˹�����������ƽ���P(gu��n)ϵ,����(li��n)���ƌ�(d��o)�к����˸��������߶ȵ�Ӱ푣����Ƴ�����������[43�c��(j��ng)����������Ќ�(d��o)�õķ�����ȫ��ͬ������߸�������Ӌ�Ĝy������,����������Q��1994���ƌ�(d��o)���ĸ�������Ӌ�ձ������������O(sh��)Ӌ��һ�����������Ľ��ٹܸ�������Ӌ,��ͨ�^��5���ֵČ�(sh��)�H�әC(j��)��(bi��o)���M(j��n)--���C��(sh��)��ԓ���̵ĿƌW(xu��)�ԡ�ԓ���������m���ښ��w��Һ�w�Ĝy��,ͬ�r���m���ڲ�ͬ�Π�ĸ���,��ʽ��:

����ʽ��Qvһ�w�e����(m/s)
��һ����ϵ��(sh��)
DDһ��(bi��o)�����c(di��n)̎�F�ι�ֱ��
hһ���Ӹ߶�λ��
φһ�F�ι��F���
Vfһ�����w�e
ρfһ���Ӳ����ܶ�
ρһ���w�ܶ�
Sfһ���Ӵ�ֱ�������������e
��һ�����Π�����
�¶��x��:
��=△hSf/V,(2)
����ʽ��△hһ���ӹ�(ji��)���θ߶�
������Ҋ,�����Ƶĸ���,��ֵ��ͬ��
��������(1)ʽ��֪,��ij--�ض��Y(ji��)��(g��u)�ĸ�������Ӌ�����F�ܵ��F���c�����Π�һ��,���ӵ�����Qv�c���Ӹ߶�h֮�g��Ǿ����P(gu��n)ϵ�����ڵĸ�������Ӌ�ÜpС�F�ȵķ��������Ͷ����(xi��ng)��Ӱ푣�Ҫ�_(d��)��һ���������y�����̱������L�F�ܵ��L��,�Ķ���(d��o)�¼ӹ����y�����b����,Ŀǰͨ�еĽ��ٹܸ�������Ӌ���߶�څ����250mm,�F�ܸ߶Ȟ�60~70mm,�����(xi��ng)����ķǾ����Ѳ��ɺ��ԣ�����ij�N�����ķǾ��ԙC(j��)е�Y(ji��)��(g��u)�M(j��n)�������\(y��n)���@Ȼ�����ܾ��о��ȸߵ�Ӌ��Y(ji��)����������Ӌ��C(j��)Ӌ������,�O��������Ӌ�㾫��,ͬ�r�ṩ���õ��˙C(j��)���档
2.2���C(j��)�Y(ji��)��(g��u)�O(sh��)Ӌ
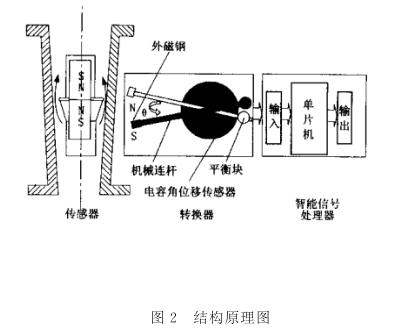
������ݽ�λ��ʽ���ٹܸ�������Ӌ�y��ԭ��Dʾ�ڈD2,�ɂ��������D(zhu��n)�Q����������̖̎���������ֽM�ɡ����ڸ��Ӄ�(n��i)Ƕ���,��(d��ng)����.�����Ƅӕr�����ͬ�r.�����Ƅ�,�c�F����һ��Ƕ��С��䓵ęC(j��)е�B�U�C(j��)��(g��u)�γɃ�(n��i)���䓴�·���,��(n��i)��䓵��\(y��n)�ӌ��������䓵�λ��,�Ķ������B�U�D(zhu��n)��һ���Ƕ�0,������ֱ��λ���D(zhu��n)�Q�ɽǶȵ�λ��,����������ݽ�λ�Ƃ��������Ƕȵ�׃���D(zhu��n)�Q�������ֵC��׃��,�ٽ�(j��ng)��̖̎���·�����ֵ��׃���D(zhu��n)����늉���̖Vout��Kʹ�z�y�·��ݔ����̖��ֵ��ӳ���w˲�r�����Ĵ�С,��:
�����D(zhu��n)�Q����һ��Ƕ�д�䓵ęC(j��)е�B�U�C(j��)��(g��u)����ݽ�λ��ʽ�������M��,������̖̎�����Ɇ�Ƭ�C(j��)������·�M�ɡ�
3�D(zhu��n)�Q�����O(sh��)Ӌ
3.1��λ������Ԫ���O(sh��)Ӌ
�������Ľo��һ�N�����^�������Եľ��ȸߵ���ݽ�.λ�Ƃ���������������O(sh��)Ӌ����,ʹ�Â��y(t��ng)�����ʽ��λ�Ƃ���������?f��)�Y(ji��)��(g��u)���y��ԭ���l(f��)���������D(zhu��n)׃��
1)�����Ҽ����(f��)�s���r���F,���ȥ�����y(t��ng)���ʽ��λ�Ƃ�������������Ҽ���늉�,���÷����}�_����Ķ��������C���ɔ_,�Ŵ�ƥ�估���`��;
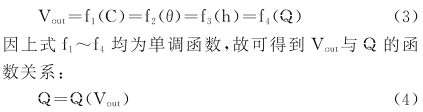
2)��M������ȫ��(sh��)�F(xi��n)늴����ι���,��������Ч��e�܇��O(sh��)�б��o(h��)�h(hu��n)�ͱ��o(h��)���c���������B�ӡ��D3���������Ԫ����?f��)�Y(ji��)��(g��u)ʾ��D����Ҫ��3��ͬ.�S�ұ˴�ƽ�еĘO��M��:
●������O�Ĺ̶��Ҟ�һ���w�Č�(d��o)늈A�P�O��4;
●�����D(zhu��n)�ӘO�Ľ��ٷְ�O��5;
●����l(f��)��O�Ĺ̶��ְ�ʽ��(d��o)늈A�P�O��6��
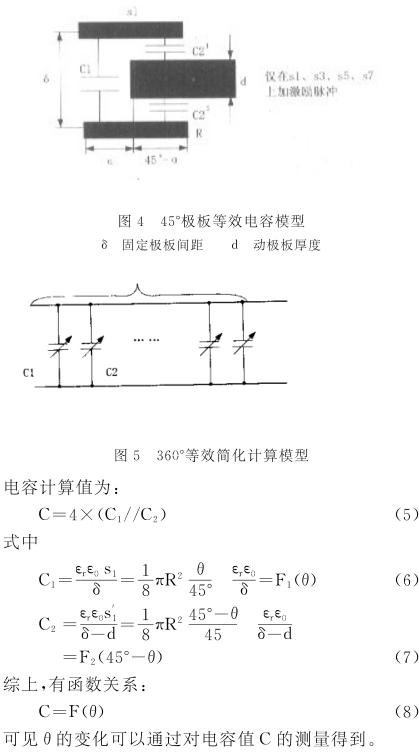
�����@3���O������ͨ�^�D(zhu��n)�S1,�D(zhu��n)�S�b�Ѓɂ��L���S�У��b��r,���C�ӘO����D(zhu��n)�Sһ���D(zhu��n)��,4.5.6�����g϶��(y��ng)�M����С�����l(f��)��O��ָ����e��ȵ��˴��g늚���x��8��������l(f��)��O�Ć�Ԫs1~s8,ÿ����ƞ�45°,������Ƭ�g϶�M����С,�ԫ@���^��������;���O����Ձ��l(f��)��O��ĸ���늺�,�O(sh��)Ӌ�У��l(f��)���c���O���(n��i)�����ⲿ���нӵر��o(h��)�h(hu��n),������늴Ÿɔ_,��D2��2��3��ʾ;�D(zhu��n)�ӘO����4���Ƕ���ͬ(45°)�g����ͬ(45°)�Ľ����~Ƭ�M�ɡ��ӘO���~Ƭ�D(zhu��n)�ӵĽǶȦțQ���˰l(f��)��O����O��֮�g8�����ֵ������(y��ng)����늺ɵĴ�С������һ�������}�_��̖ģ:ʽ�������°l(f��)��O��ͽ��O��֮�g�a(ch��n)����ݡ�
��������(j��)�O(sh��)Ӌ��Ҫ,�����г̛Q���C(j��)е�B�U�Č�(sh��)�H�D(zhu��n)�Ǧ�����׃�������s��30°,��ˣ����]늈���߅��Ч��(y��ng),�O(sh��)Ӌ�r��(y��ng)��һ������,�ʌ��������Ԫ���O(sh��)Ӌ���܉�?q��)?5°�Ľ^����λ���M(j��n)�Йz�y���ɡ�ͬ�r����ߙz�y��ֵ,��s1.s3��s5��s7늚��B��,s2��s4��s6��s8늚��B��,�z�y��ֵ���4�����������ƵĽ�λ�Ƃ������ęC(j��)е�B�U�D(zhu��n)��(�s30°)С��45°,��H��s1.s3��s5��s7ʩ�Ӽ���늉�,�t45°��(n��i)�O���g���ģ����D4��ʾ��360°��(n��i)��ЧӋ��ģ�Ϳɺ�����D5��
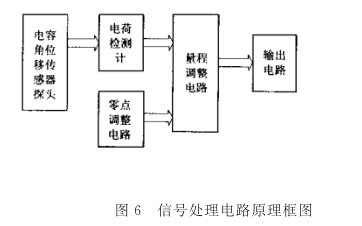
3.2��̖̎��
����������ݵ�Ч�·��֪,����Ӌ��ģ�͌�(sh��)�H�Ϻ�����늈���߅��Ч��(y��ng),��ͨ�^(4)ʽ����Ӌ������ֵ�c�挍(sh��)ֵ��(y��ng)��һ���`����IJ�����ݜy���·�������(sh��)�Hֵ�M(j��n)�Йz�y���D6����̖̎������ԭ����D����������Ӿ�·ǰ�˞�һ늺əz�y��,�Խ����·�����l��̖���`����,ͬ�r����ˌ�늴ň��ɔ_���m��(y��ng)�������y�����ֵ��С,ֻ��13pF����,�ʲ�ȡ���늷��y����ݣ��c���y(t��ng)������ͬ,���IJ��õ���һ�N�������ɔ_��С��ݜy���·��
4���ܻ��O(sh��)Ӌ
4.1����Ӌ���c�̶ȓQ��
����ǰ���ἰ��ʽ(1)������Q�c���Ӹ߶�h�g���ڷǾ����P(gu��n)ϵ;����,�类�y���|(zh��)�ܶȡ��ضȡ������c��(bi��o)�����|(zh��)��ͬ,����̎��ͬһ�߶ȕr,����ӳ��������ֵ������ͬ,�����Ӌ�㾫�ȼ��Ԅ���ɿ̶ȓQ��,����Ӌ��C(j��)���g(sh��),��׃�˂��y(t��ng)�Ľ��ٹܸ�������Ӌ��횸���(j��)���y���|(zh��)���ܶ��M(j��n)�����_�O(sh��)Ӌ����,�������̷����M�㹤�r�l���r,�F(xi��n)��ͨ�^�˹������M(j��n)�п̶ȓQ��Ġ�r�����ܻ�ˮƽ�õ��^����ߡ�
������Փ.��Һ�w�c���w�����y�����ܶ�������ʽ�քe����:
4.1.1Һ�w������������ʽ������������(1)��(d��o)����
�����yҺ�w�ܶȲ�ͬ�ژ�(bi��o)��ˮ�r������������ʽ:
4.2Ӳ���O(sh��)Ӌ
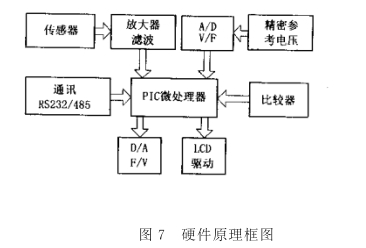
����������̖̎������Ӳ��ԭ����D7��ʾ,����IJ���������ij��˾��PIC��Ƭ�C(j��),���(n��i)��������ROM��RAM�����r������(sh��)��(j��)�ɼ��������T���·����늏�(f��)λ�·,�ɹ�(ji��)ʡ��������·��
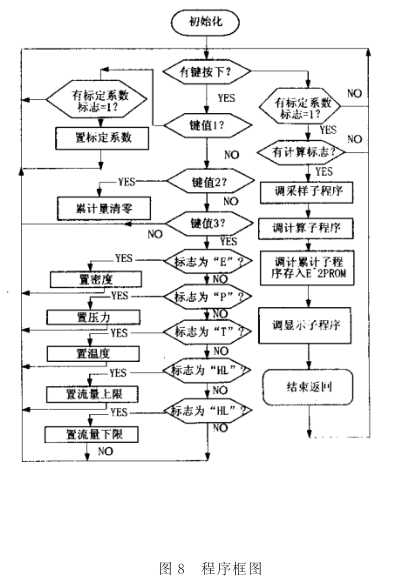
4.3ܛ���O(sh��)Ӌ
����ܛ���O(sh��)Ӌ������D8��ʾ���Ɍ�(sh��)�F(xi��n)�p��8λLCDͬ�r�@ʾ�۷e������˲�r����;ͨ�^�x������3�����I�Ɍ���(bi��o)������ϵ��(sh��)��С��(sh��)λ��(sh��)�����y���|(zh��)���ܶȡ��ضȡ����������sϵ��(sh��)�ȹ��r����(sh��)ֱ�������Ƭ�C(j��),�Ԅ���ɿ̶ȓQ��,��(sh��)�F(xi��n)���������_�y��,�o��ͬҪ���Ñ���ʹ�Î���O��,�o�����_�O(sh��)Ӌ����,�c���Hͬ��о��ɹ�����^,�@ʾ������(qi��ng)�����ܻ�ˮƽ��
5�әC(j��)��(bi��o)��
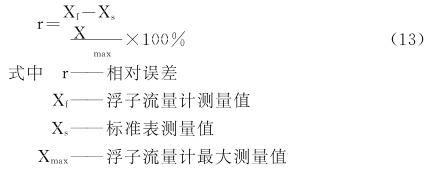
����PIC��Ƭ�C(j��)�c�F���Ѓ�(n��i)Ƕ��䓵ĸ��ӡ���ݽ�λ�Ƃ�������Ӳ����̖̎���·����Ϙ�(g��u)��3�_(15mm��50mm��80mm�ڏ�)��ݽ�λ��ʽ���ٹܸ�������Ӌ�әC(j��)��ԓ�әC(j��)����D9��ʾ�Č�(sh��)�(y��n)��(bi��o)���b�����M(j��n)�И�(bi��o)������λˮ����36m,��(sh��)�F(xi��n)��(w��n)��ˮ�����Ա��������㶨����(bi��o)��(zh��n)���x��늴�����Ӌ,�`���0.2%����(bi��o)�����E:

1)���ÅR���Z���O(sh��)Ӌ��������Ӌ���Ø�(bi��o)��ܛ������(bi��o)���c(di��n)6�c(di��n),ÿ�c(di��n)3��,�����г̸�5��,ӛ䛘әC(j��)˲�r늉��ɘ�ֵ(V/s)�c��(bi��o)��(zh��n)��˲�r����ֵ(m³/h),��6����(bi��o)���c(di��n)̎��ƽ��ֵ�ӱ��M(j��n)��3�A�M��,�õ�V/s-m³/h�ĺ���(sh��)�P(gu��n)ϵ(4),��Q=Q(Vout),ͨʽ��:
Q=A+B1*V+B2*V²+B3*V³;(12)
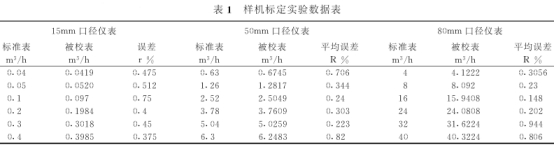
2)����һ���õ��ĺ���(sh��)�P(gu��n)ϵ�����Ƭ�C(j��)��,ʹ�ØәC(j��).�@ʾݔ����˲�r����m³/h����Ӌ����m3,�ٴΘ�(bi��o)��,��(bi��o)���c(di��n)6�c(di��n),�����г̸���3��,���ȘәC(j��)�c��(bi��o)��(zh��n)����˲�r����,�����әC(j��)�`��,��(bi��o)����(sh��)��(j��)Ҋ��1�� 15mm��50mm��80mm�ڏ��ĘәC(j��)��(bi��o)���r�������������քe��0.04~0.4m³/h��0.63~6.3m³/h��4~40m³/h,
���̱Ȟ�10:1��
�����M�������`��Ӌ�㹫ʽ��:
6�Y(ji��)Փ
������ݽ�λ��ʽ���ܽ��ٹܸ�������Ӌ�о��Y(ji��)������:
������������(j��)��Q���ƌ�(d��o)���ĸ�������Ӌ�ձ���������,�m���ښ��w��Һ�w�y��,��������Π�Ӱ�,�Ķ��鱾���о���Ϫ������Ӌ�y�����ȵ�����ṩ����Փ����;
�����o�����(j��)���y���|(zh��)���ܶȡ�ʹ�ù��r�l�������������M(j��n)�����_�O(sh��)Ӌ����,���o���a(ch��n)�S�̺�ʹ�ò��T����O��ķ���;
������׃�ˇ���(n��i)���ٹܸ�������Ӌ���M(j��n)�a(ch��n)Ʒ�͇��a(ch��n)�a(ch��n)Ʒ������ÙC(j��)е�Y(ji��)��(g��u)�M(j��n)������Ӌ�����(d��o)�¾����^�͵Ġ�r;
��������ݽ�λ��ʽ�������y������λ��,���PIC��Ƭ�C(j��)�M�ɵ��������ܽ��ٹܸ�������Ӌ,�\(y��n)�Ì�(sh��)�(y��n)��(bi��o)����(sh��)��(j��)�ķ����õ�ԓ����Ӌ˲�r�����ľ��Ȟ�1��,ͨ�^���@3�N�ڏ��ĘәC(j��)�B�m(x��)�\(y��n)�Д�(sh��)�º�����(bi��o)��,���Ȳ�δ�l(f��)��׃��,�C��(sh��)��ԓ�x���Ŀɿ��ԡ�
���ā�Դ�ھW(w��ng)�j(lu��),�����֙�(qu��n)(li��n)ϵ���h����