ժҪ:��B���û����������z�y����λ�ơ����õ��Ć�Ƭ�C�������̎���������ٹܸ�������Ӌ�����ؽ�B���û���������������λ���M�Йz�y�Ļ���ԭ���Լ�����������ݔ����̖̎��ϵ�y(t��ng)��Ӳ����ܛ���OӋ�������@�N���ܽ��ٹ��D������Ӌ����Ҫ���c��
1����
�����ڹ��I(y��)���a�Ϳ��Мy���У���(j��ng)������С�����������Z��(sh��)�������y������������Ӌ���ھ����`���ȸߣ��y��������,�����pʧ�^С�Һ㶨���y�����|�N࣬�����ɿ�,�S�o����,���x��ǰֱ�ܶ�Ҫ�ߵȃ�(y��u)�c,�ѱ��V�����á�
������������Ӌ�ĸ���λ���c����֮�g�������_�����ĺ���(sh��)�Pϵ���y������λ�Ƽ��ɴ_��������С�����ٹܸ�������Ӌ(���º��Q����Ӌ)�����B�m(x��)�y�����]�ܵ���Һ�w�����w������������,���ܾ͵�ָʾ�������h����̖,�Ɍ��F(xi��n)�����y��ֵ���h���x�@ʾ��ӛ䛡�Ӌ.�㡢�{��(ji��)���Ƶȹ���,��ˏV��������ʯ�͡���������Դ��ұ���t(y��)ˎ���p���������Ȳ��T]�������z�y���^�̿��ơ���������Ӌ�ĸ���λ�Ʋ���ֱ���x��,���Ԍ���䓷��븡�Ӄȣ����O���D�Q���ȵĴ���ϙC���õ�����λ�ƣ�����λ�Ƃ��������c���������ĸ���λ���D�Q�����̖���Ԍ��F(xi��n)�h��ݔ����Ŀǰ���õ�λ�Ƃ������ЃɷN:�׃����ʽ�����������ʽ��λ�Ƃ�����������ʹ���@�ɷNλ�Ƃ�����Ҫ�@���c����������λ����̖,��Ҫͨ�^�������Լ����������B�U��݆�șCе�C���M�зǾ��������͂��Ӂ팍�F(xi��n)���@�͕�����D�Q�����ӭh(hu��n)��(ji��)�ࡢ�Y�����s������Ħ�������ز�����,�Ķ���������Ӌ�Ĝy�����ȡ���˟o�����F(xi��n)����Ӌ���D�Q��ȫ��ӻ���С�ܻ��Լ��ڴ˻��A�ϵ����ܻ�����ˣ��Ƴ����û����������z�y����λ�ơ�����16λ���Ć�Ƭ�C�������̎��������������Ӌ��
2ϵ�y(t��ng)����ԭ��
����ԓ����Ӌ���þ��Ի����������z�y����λ��,��φ�Ƭ�C����ϵ�y(t��ng)����ȫȥ���˴����ϡ��Ǿ������������ӵșCе�C�����乤��ԭ����D1��ʾ��
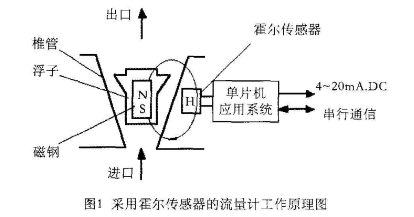
���������y���w���¶������^�F�ܕr�����Ӯa��λ�ƣ�ͨ�^���Ի����������Ĵ������ǶȾ͕��l(f��)��׃�����Ķ�ʹ����������ݔ������늉���ԓݔ��늉�ݔ�뵽��Ƭ�C����ϵ�y(t��ng)�M��̎����ݔ���c���������Ę˜������̖,Ҳ��ͨ�^�˜�ͨ�Žӿ��M�Д�(sh��)��(j��)�h�̽��Q��
����������Ӌ���D�Q���Ќ�������λ�Ʒ������gλ��̎���Ãɂ�����һ�µĻ���������,�ɂ������������Ĵ������滥��90*��������������ݔ��늉���:
E1=K1·I1·B1·sin��
E2=K2·I2·B2·sin(90°-��)
ʽ��:
K1��K2������`����ϵ��(sh��);
I1��I2�����Ԫ���ļ������;
B1��B2�������������̎λ�õĴŸБ�����;
�Ȟ�����������ڻ����������Ĵ�������ăAб�ǡ�
�������ɂ������������x������һ�µ�ͬ--��̖�� ��������,����ͬһ�������,̎��ͬһ-�߶�λ��,����K1=K2,I1=l2,B1=B2����˿ɵ�:
E1/E2=sin��/sin(90°-��)
=sin��/cos��=tg��
��=arctg(E1/E2)
������Ҋ����E1��E2������������ăAб�ǡ�
�����ɈD1��Ҋ���S����������,ͨ�^�����������Ĵ������ĽǶ�형r�׃�����������Aб��0�Ϳ��Եó����ӵ�λ�ơ�
3��Ƭ�C����ϵ�y(t��ng)Ӳ���OӋ
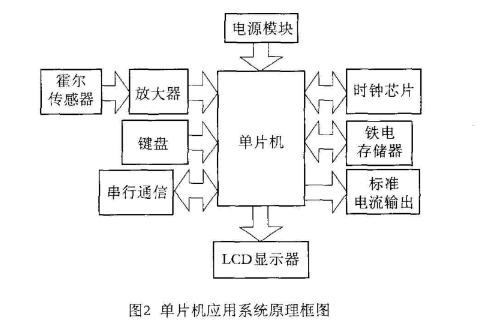
������Ƭ�C����ϵ�y(t��ng)��ԭ����D��D2��ʾ��ϵ�y(t��ng)��������һƬMSP430F149��Ƭ�C��MSP430F149����Ҫ�����c��������:
(1)�����������:����CPUOFF��OSCOFFģʽ������늉�����1.8V��r�¹�����
(2)���A�r�ģ�K:����1����(sh��)����ʎ��(DCO)��2�����w��ʎ����
(3)ϵ�y(t��ng)����ģ�K:LCD������A/D�D�Q����I/O�ڡ�USART���ڡ����T�������r����Ӳ���˷�����ģ�M���^����EPROM�ȡ�
(4)16λRISC�Y����125asָ�����ڣ��ȴ���ʽ�M�І��ѵĕr�g��6Ixs.
(5)ܛ������RAM���\�С������ͨ�^UART��yԇ���_�b��RAM�������ڌ��r�l�����\�С��ɽ���ԇ���{ԇ���_�N��
(6)�x3�Nָ���ʽ��ȫ���������Y���������˳�����_�l(f��)��ROM�xȡ��RAM��ȡ����(sh��)��(j��)̎����1/O���������������ʹ�ù���ָ��o����ָ�
(7)ϵ�y(t��ng)������(w��n)������늏�λ��������DCOCLK����CPU,�Ա��C��������_��λ���_ʼ��(zh��)�У����C���w��ʎ������������(w��n)���r�g��������w��ʎ��������CPU�r�MCLK�r�l(f��)������,DCO���Ԅӆ��ӣ��Ա��Cϵ�y(t��ng)��������;����������w�����T���Ɍ����λ��
(8)���и��Z�Ծ�������,���_�l(f��)��C-���g����֧��JTAG���档
�������Ի���������������λ���D�Q��늉���̖,��(j��ng)�Ŵ����Ŵ����16λMCU�M���\��̎���ͷǾ����������������ֵ��һ������LCD�@ʾ���@ʾ����һ��������DAC�D�Q��ģ�M�����ٽ�(j��ng)ݔ���D�Q�·�D�Q�ɘ˜������̖ݔ�������⣬߀��ͨ�^����ͨ�Žӿ�RS485�c��:λ�C�M�Д�(sh��)��(j��)���Q��
4ܛ���OӋ
����ܛ���������̈D��D3��ʾ����Ƭ�C����늺͏�λ�ĕr����Ҫ��(zh��)�г�ʼ������Ȼ�������Д��ģ�K�Ę�־λ������־λ��Ч�r����(zh��)��ԓ����ģ�K�ij������־λ�oЧ���t���^����(zh��)�С��������(zh��)�е������ѭ�h(hu��n)���ص���ʼ��֮��
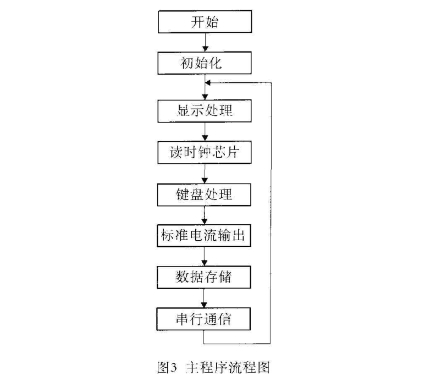
�����˜����ݔ��ģ�K��RS485����ͨ��ģ�K��־λ���ɒ���ܴa�_�P�������Q����;��(sh��)��(j��)�惦����ͨ�^������xȡ�r�оƬDS1307���Д��Ƿ����A���O���Ĵ惦�r�g�����惦�r�g���M�딵(sh��)��(j��)�惦�ӳ���RS485ͨ�Ō��F(xi��n)�˔�(sh��)��(j��)���h�̂�ݔ���˂�����ֱ�ӵ��F(xi��n)��ȥ�鿴���N�x���ą���(sh��)ֵ,ͨ�^�^��ͨӍ���漴�ɫ@�î�ǰ�͚vʷ��(sh��)��(j��)��
5�Y���Z.
�������ڲ��û����������M��λ�ƙz�y��ʹ����Ӌ���D�Q������Ҫ�κοɄӵęCе���,���F(xi��n)��ȫ��ӻ���С�ͻ�������˻ز�;����16λ��Ƭ�C�M�о����������\��,��ʹ����Ӌ������ָʾ������2.0����ߵ�1.0����
�����Ϸ�����Ҋ�����ڲ��û�����������16λ��Ƭ�C��ʹ����Ӌ���F(xi��n)��С�ͻ�����(sh��)�ֻ������ܻ�,���������Ӌ�ľ���,����������Ӌ�Ĺ��ܣ���ʹ���_�l(f��)�F(xi��n)�������͵�����Ӌ�ɞ���ܡ�
���ā�Դ�ھW(w��ng)�j,�����֙�(li��n)ϵ���h����