ժժҪ:��늘O����ʽ늴�����Ӌ��һ�N���͵Ĝy��ע�����������Ĝy������x��,�V������������עˮ����ע�۾��������y����Ŀǰ��늘O����ʽ늴�����Ӌ���о���Ҫ�ڌ��H�h�����_չ,���Ч�ʵ͡��ɱ��ߡ���������늘O����ʽ늴�����Ӌ�Ĝʴ_������Ԫģ��,������ϵķ���������늴ŽY�����w���.��,���ڲ�ͬ�������_չ��ģ�͵�푑����`��������о�����,ԓ����Ԫģ����һ���̶��Ͽ�����늴�����Ӌ��������������������^С�r,����Ԫ����Y���c����`���^��;�����^��r,����څ���ڄ��و�,����Y���c���Y���`���^С��
�������������β�����,ע�ۺ�����������ԭ�Ͳ����ʵ���Ҫ�ֶ�֮һ,����ˮ�Ч�������20%����;�F��������,�^ȥ���õ�ע������y���x���ѽ����m��ע�ۺ���y��������yԇ��Ҫ��늴�����Ӌ��һ�N���͵Ĝy��ע������ăx��,�^�õؽ�Q�˾ۺ���ע������Ĝy�����}��
������늘O����ʽ늴�����Ӌ��ᘌ�������_�l��һ�N����늴�����Ӌ,�䲻�H������ͨ���I늴�����Ӌ�o��������,������,���g�Ժ�,�y�����Ȳ��ܱ��y���|�ضȡ��ȡ��ܶȡ����������텢����Ӱ�����ʾֵ��һ����늌��ʷ������c���˶���Һ�w�No�P�����c,߀�����w�eС���ߜظ߉������������Q���y������Ӱ��^С�ă��c,�������骚���O���M�о��y��,Ҳ����������s���ܜy�{ϵ�y�Ĕ����ɼ��K�ˡ������ԭ���ǻ��ڷ�����늴ŸБ�����,�������Һ�w���^�ň����и�������\�ӕr,�t�ڴ�ֱ�����������ʹň������ķ����ϕ��a��һ���c������С�����ȵĸБ�늄ӄ�,����_ʽ��

����ʽ��:Ɛab��Б�늄ӄ�;����늘O1��λ������;b��늘O2��λ������;B�����wԪ̎�Ĵň�����;V�����wԪ���ٶ�;dl�����wԪ���L�ȡ�
������˿�֪��ͨ�^�y�øБ�늄ӄݵĴ�С�����ɜy��������С��
����Ŀǰ,��늴�����Ӌ���������Ԫ��ģ�о��^�١�1996�꣬MICHALSKI�Ȼ�������Ԫ�����IJ�ͬ�Π�ͳߴ�����w�ܵ���ֵģ�͌���ž�Ȧ�ęM�����Π��M�Ќ���,�ԫ@�þ����ʸ���e3];2002�꣬MICHALSKI��������Ԫ����������늴�����Ӌ��ž�Ȧ��3D��ϔ��Wģ��;2009��,�����µ���Ansys����늘O����ʽ늴�����Ӌ�����˶��S����Ԫģ��,�ó��˔�ֵģ�M�Y��,�������늘O����ʽ늴�����Ӌ����Փ��������(���@��ģ�͟o���M�з��挍�);�w�ݷ�Ƚ�������ͨ���I����ʽ늴�����Ӌ�Ķ��S����ģ��°0(����ʽ������ʽ���䑪�õĈ��ϲ�ͬ,��������Ӌ�ĽY��Ҳ��ͬ);2010�꣬��־������Matlab����늘O����ʽ늴�����Ӌ���غ����ֲ���r�M������Փ�ƌ��ͷ���Ӌ��,���Mһ���_չ��늘O����ʽ늴�����Ӌ���о����_�l�OӋ�춨����Փ���A���������о�����������Ԫ������һ�N�о�늴�����Ӌ����Ч�ֶΡ�������늘O����ʽ늴�����Ӌϵ�y�����ܽY��������늚Ⅲ���ȱ���������Ӱ�,Ӱ�Ҏ�ɏ��s,��׃ij--����������Ҫ׃�QӲ��,���Ч�ʵͶ��ҳɱ��ߡ���˲�������Ԫ���������ܷ�ӳ�����ԵĶ����������ģ��,�_չ늴�����Ӌ���Ҏ�ɺ����S�߶��´ň��ֲ�Ҏ�ɼ�Ӱ������о�,�Ƀ����ň��OӋ����,ָ���������Č���c�OӋ,�@�����ͳɱ�,����_�l�ʴ_�ʼ�Ч�ʡ�
1����Ӌ��·�������Ԫģ�͵Ľ���
1.1���S���wģ�͵Ľ����c����
����늴�����Ӌ���wģ���в��H������Ȧ����Ȧ�ܡ�늘O���y���ܡ��^���ס��՚������������Ҫ����,߀����ƽ�����w��ƽ�����ס���|���^�^�������^�������o������������o�����ň���늘O�ĸБ�늄ӄݛ]��Ӱ�,ͬ�r������Ҫ�����϶��ӹ����b������,���@Щ���������ň�����̖Ҳ�]��Ӱ�,��˞������Ӌ��Ч�ʣ��Ɍ�������ģ���M�к������������ģ�Ͱ���:1)��Ȧ����D1a);2)��Ȧ�ܣ���D1b);3)늘O,��D1c);4)�՚�����D1d);5)���w��,��D1e);6)�y������,��D1f)��
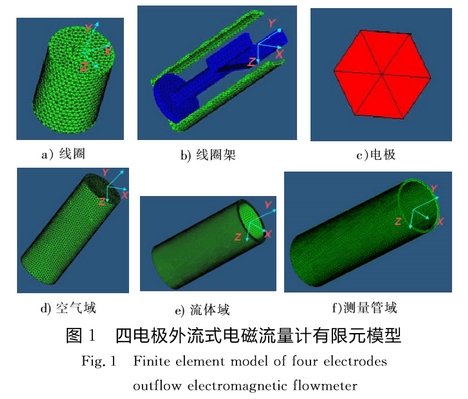
������Solidworks�н����˺����Ă��������wģ��,Ȼ���䌧�돊��ľW��ܛ��HyperMesh���M�в����\��;W�֣����ڌ��wģ�͌������Gʧ�w��Ϣ�����ģ�͌����Ҫ�������ø������w�������������w��
1.2����Ԫģ�͵�ǰ̎�����O��
����Ansys�ڹ����I����������������֪(8],�ʲ���Ansysܛ������늴ň����ܛ����������������Ԫģ���еĸ��������������S���w,ģ�ͳߴ��H��,���M�оW�֕r���д����W��a��,����Ӌ����,��ԓģ���г������w���늘O��Ӌ������,�������ֶ�����Ҫ���cӋ��,��ˌ���Ȧ����Ȧ�ܡ�늘O�ľW���С�O�Þ�2mm,�՚���ľW���С�O�Þ�3mm,���w��ľW���С�O�Þ�1mm��
��������Ԫ�W����|��ֱ��Ӱ�Ӌ�㾫��,�����ԄӾW��,��Ԫ�Π�������w,�־W��ͼ��W��֮�g�^�ɲ����⻬,��ˌ����w��Ϳ՚���֮�g�Ĝy������ľW���Ԫ��С�O�Þ�2mm���W�ֺ�,����Anrsys���M�І�Ԫ��͡����ϡ����������d�ɡ�߅��l���͈�·��φ�Ԫ�O�á���Ȧ���~�����F,�є���6500��,�����e��2.72��10-4:mm²,�w�e��1.49��10-5mm3;��Ȧ����ϵ�Ϊ����x��ֲ�������ϵ���S�����Y����,���ಿ��������ϵʹ��ȫ�ֵѿ�������ϵ���S�����Y�����������IJ��υ����O��Ҋ��1��
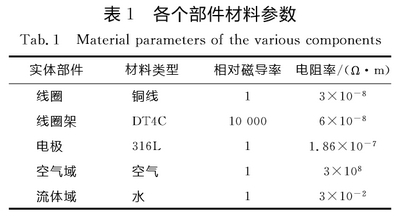
�������ˌ��F��ŷ�ʽ�Ŀɾ��̣���Ҫ�Ѿ�Ȧ��Ԫ��ϵ��·,��˽���2��Circu124�քe���F����늉�Դ��Ԫ����φ�Ԫ,V;���c���λ���x��0,Ȼ��Ȧ��Ԫ������-һ�����c���x����φ�Ԫ��K���c�Ԍ��F���,���w��D2��ʾ��.
2ģ��У�
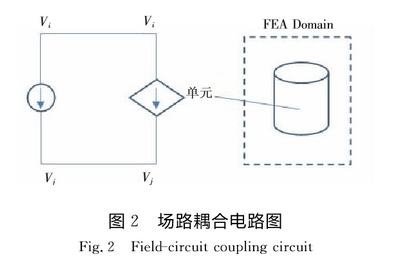
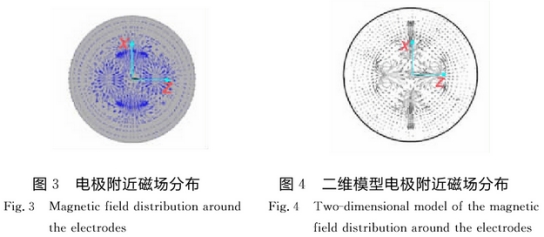
�������˱��Cģ�͵����_��,����������늘O����ʽ늴����������������S����Ԫģ��,��2�������M����У�:����,�o����Ԫģ��ʩ�Ӻ�ֵ�������,�x���o�B������,��ģ������Ȧ���c��Ax,Ay,Ax���ɶȾ��O��0,�x�����І�Ԫ���M����⣬Ȼ���ں�̎�������x��Y��������늘O�����Ĵň�;�ֲ�,��D3��ʾ,�ň��ֲ����Ͻ����µȔ�ֵ�����ĽY��'5],��D4��ʾ;���,�ڬF��ģ�ͻ��A�ϼ��ܾW���Ԫ�����øБ�늄ӄݴ�Сǰ���`��С��5%,�Ķ����C����ԪӋ��Y�����ܾW���|��׃����Ӱ푡��C������,ԓ����Ԫģ���ǜʴ_��,���Á��M�з����о���
3��ͬ������ģ�͵�푑����`�����
������Ϸ�����2�N����:�����(��Q�o���)�������(��Q�����)�������ͨ�^��Ԫ��ꇻ���d������������Ø��쵽���Ʒ�����,Ȼ���Ʒ���ֱ�����,��ȱ�c���ژ�����Ʒ����^���г������ò������}�M��ijЩ����,�Еr��Ӌ��ʴ_�̶��^�y���C�����������ÿһ���ȷքe��ÿһ�N�������M��һ�����,ͨ�^�ѵ�1��������ĽY����������d���ڵ�2��������팍�F2��������ϡ��䃞�c�ǿ������ìF�е�ͨ��������늴ň�ܛ��,���ҿ��Էքe��ÿ--��ܛ���Ϊ����ƶ����m����ⷽ��;ȱ�c��Ӌ���^�̱��^���s�������ͨ���m���ڌ���ψ�����Փ����,������m���ڌ���ψ��Ĕ�ֵӋ�㡣
�������挦����⏽�ߴ���38mm,�乤���Ĺܵ��ȏ���46mm,��������e��ȵ�ԭ�t,���Ч����26mm�������Z��Re<2000�r,�ܵ������Ӡ�B�����;��4000>Re>2000�r,�ܵ������Ӡ�B���_��;��Re>4000�r,�ܵ������Ӡ�B�������������Ӡ�B�������r,�� ��Ӌ����������ӌ�������Сƽ������V=0.092m/s.
��Ӌ����������ӌ�������Сƽ������V=0.092m/s.
����ʽ��:V��ƽ������;D��A��ֱ��,ȡ26mm;ʋ���\����,ȡ0.6��10-6m2/s��
�������,���ܵ���ƽ������V>0.092m/s�r,�ܵ��ȵ����Ӡ�B������;���ϣ���늘O����ʽ늴�����Ӌ�ڹ����ĕr�ܵ��ȴ�����������ٶȶ������@��ֵ�����ܵ��ȵ����Ӡ�B�������r,��CFDܛ���M������������Ӌ��,ͨ�^CFDģ�M�����Է��������@ʾ���w�����^���аl���ĬF��,���r�A�y���w��ģ�M�^�����������[10],������Ԫܛ��Ansys�е�FLOTRANCFDģ�K���������M�з������,Ӌ��Y����D5��ʾ��
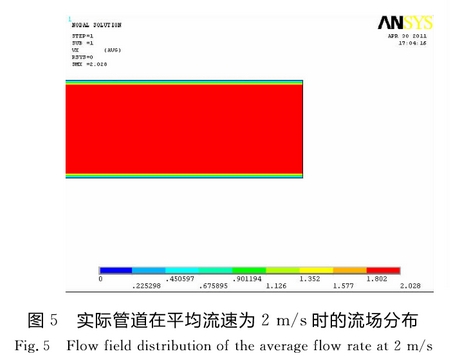
�����ڽ���0.2mm̎�ٶ��^С������λ�ö��ӽ�ƽ���ٶȡ����ڴ�,���Ԍ����w��Ч��һ�����ٌ��w,�Ï���ϵķ����M��늴�������ϵķ�����
���������������x����10����ͬ������ֵ,����늉�Դ���̞��ֵ���β�,��ֵ��15V,�l�ʞ�1Hz,�����������M���˷���Ӌ�㣬���ڌ���_�ϵó��ˌ���,����_���þ��Ȟ�0.5%��늴�����Ӌ�xȡ����ֵ,����̖̎���·�ɼ���늘O����ʽ늴�����Ӌ�ĸБ�늄ӄ���̖,ͨ�^����ݔ�뵽Ӌ��C�@ʾ,����_ԭ��D��D6��ʾ������@2�N�����M�����`�����,�Y��Ҋ��2��
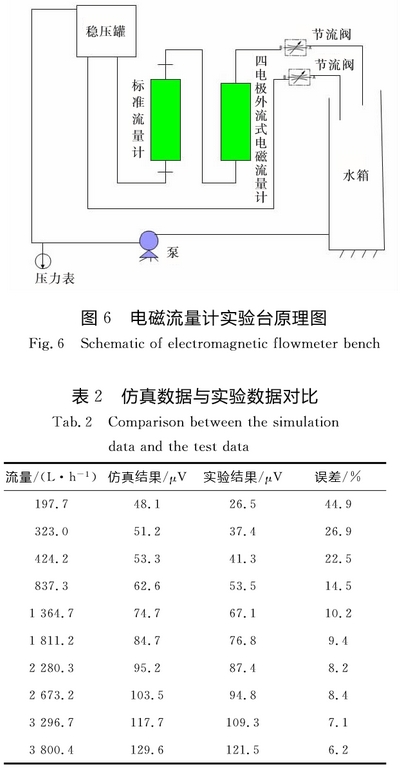
�����Č��Y���ͷ���Y�����`�����,�����^С�ĕr���`��dz���,�S�����ٵļӿ죬�`����u�pС���@���������Խ��,������Խڅ���ڄ��و�,����Ӌ��ķ���Խ�ӽ��挍��r���`��һ�������ɷ���ģ�͵ĺ��������,��һ����������̖̎���·�����,����ģ�ͷ�ӳ�ˌ��H����r,�������ڄ�ż��g���ȵ���Փ������
4�Y�Z
����ͨ�^����Ԫ������������늘O늴�����Ӌ�ķ���ģ��,��2�����挦ģ���M����У�,��C��ģ�͵����_�ʡ��ڲ�ͬƽ��������,�Ï���ϵķ�������Ӌ����ģ�͵�푑�,��Ӌ�����`��о�����,ԓ����Ԫģ����һ���̶��Ͽ�����늴ŽY�������ķ������,�����^С�r,����Ԫ����Y���c����`���^��;�����^��r,����څ���ڄ��و�,����Y���c���Y���`���^С��
���ā�Դ�ھW�j,�����֙�ϵ���h����