ժҪ:���������w�u������Ӌ����,�����w���W�ĽǶȷ����˜u������Ӌ�y���`��a����ԭ��,�Y�Ϛ��w�y�������c,ʹ����һ�N���̻��Ľ�Q���������������Ì��H,�o�������_�Č����r�����D����˛r������ܛ��Ӳ��������
1����
�����u������Ӌ�ַQ���T�u������Ӌ,���������w���^�ϵK��r�a�����������u,ͨ�^�y�����u�a�����l�ʶ����F�����w������Ӌ����
�����u������Ӌ��70����lչ������һ�N���������y���x�����䃞�c��Ҫ��:�x��Ȳ��]�пɄӲ���,�Y������,ʹ�É����L;�y��������,--����r���̱Ȟ�1:10~1:15;�x��ݔ�����l����̖�����ڌ��F���ֻ��y��;�m���ڶ�N���|�y��4]��Ŀǰ����Һ�w�u������Ӌ�y�����Ȟ���1% ,���w�u�����Ӌ��+1.5%���@�ӵľ��������Q�Y��Ӌ���Dz������˝M��ġ������Ԛ��w�u�����Ӌ���о��������w���W�ĽǶȷ����u������Ӌ�y���`��a����ԭ��,���o����һ�N���̻��Ľ�Q������
2�u������Ӌ��ԭ�����y���`��a����ԭ��
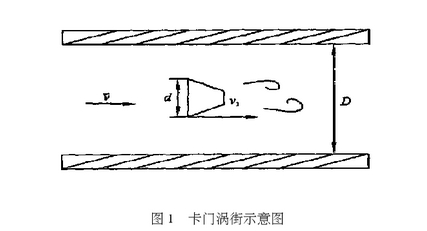
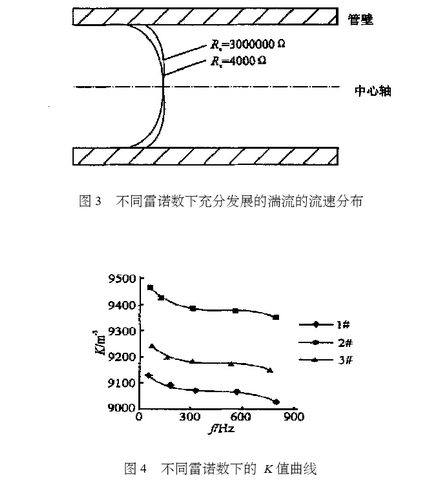
�����u������Ӌ�ǻ������w���W�������ġ����T�u�֡����Ƶġ������ӵ����w�з���- -�������������w,�Q���u�l���w,�����w�����u�l���w�@���r,���ڜu�ְl���w���ήa�����в����Q����Ҏ�ɵĽ������u��,�@�������^�Ŀ��T�u��,��D1��ʾ��
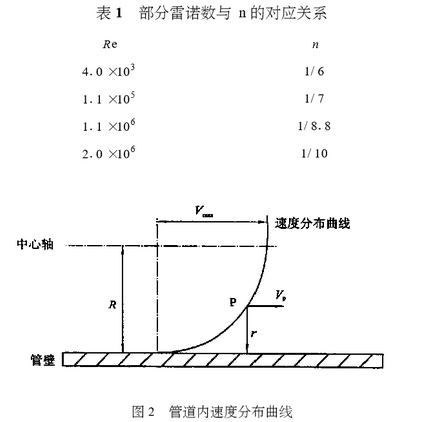
���������Č�����Փ�C��:�����Ĝu�ְl���l��ƒ�c�����ٶ�v1�����u�l���w����������d�����´_���Pϵ��:

����ʽ��St��˹���_����,�c���Z����d���P��
���������Z��Re��һ��������(3 X102~2 X105)�r(4],St��һ����,���������������u�l���w�s��0.16
�������Z���Ķ��x��
����ʽ��S��ܵ��ęM����e��
�����ɚ��w�u������Ӌ�Ĝy��ԭ����֪,ͨ�^�y�����u�l���l�ʃH�ܵõ����u�l���w����������vI,��ʽ(3)��֪�ڙM����eһ������r��,���w������Q�c���w��ƽ������v������,���Ҫ���_Ӌ�����w����������ҵ�`v�cv1�Č����Pϵ��
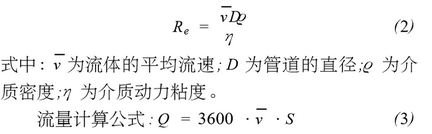
�����������w���W��Փ,�ڳ�ְlչ��������B�£����w���ٶȷֲ��������Pϵʽ��:

����ʽ��:vp�鵽�ܱھ��x��y��P�c���ٶ�;y���c���ܱ�̎�ľ��x;Vmax:��ܵ��е��������,ͨ��ȡ�ܵ����ĵ��ٶ�;R��ܵ��İ돽;n�����Z���ĺ�����
��1�нo���˲������Z���cn�Č����Pϵ��
�����������u�l���w��λ�ù̶�,��ˮ����Z��һ���rv1�c`v�й̶��ı����Pϵ�Q��֮,�����Z��Re׃���r,���ߵı�ֵҲ�l��׃����
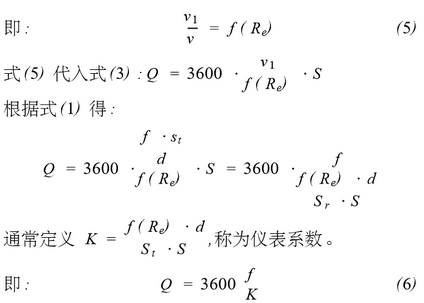
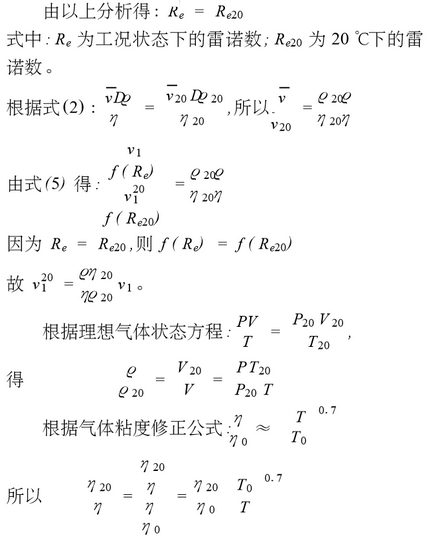
�����D3�o���˲�ͬ���Z���³�ְlչ�����������ٷֲ�,��D��ʾReԽ��,���ٷֲ�Խƽ��,�����u�l���w����������Խ�ӽ�ƽ������,��ƒ( Re)������{�f�p�������D4�o����3�_50mm�ڏ�������14 mm���������u�l���w�Ě��w�u�����Ӌ,��20��,һ���˜ʴ�≺��,��ͬ���Z���µ�Kֵ��������D��ʾ�����c��Փ��������һ��,��˜u�����Ӌ�Ĝy��ԭ�����Q���˃x��ϵ���ķǾ������ԡ���Ҫ��ߜu������Ӌ��Ӌ������,���ᘌ���ͬ�����ٷֲ���Kֵ�M��������
3�˶���B��Kֵ������
������20 ��,һ���˜ʴ�≺�Ę˶���B��,�՚���ܶȺ�ճ�Ȟ鳣��,������Z���H�c���w��ƽ���������P,ƒ��ƽ������`v�Ќ����Pϵ,��������º����Pϵ:

�������D4�е�Kֵ�����о��l�F,3�l�����Π����һ��,ֻ��ƽ�Ƶij̶Ȳ�ͬ���ʿ��Ԟ�ͬһ�ڏ��Ĝu������Ӌ�_��һ�l������������G(f),ͬ�r�y��ÿ�_�x����ƽ���x��ϵ��`K,��������˼��ɵõ�ԓ�_�u������Ӌ�ڲ�ͬ�l���µ��挍�x��ϵ��,��:K=`K.G(ƒ)
�����ڌ��H�����Ќ�G(ƒ) �����ض����ӳ���,���a�S�Ҹ����˶��Y������R���ɡ�
4������r�µ�����
�������w�u�����Ӌʹ�õĹ�����r(���Q���r)ͨ���c�˶���B��ͬ,���ښ��w���w�e�����ܜضȡ�������Ӱ푱��^��,�ڌ��H������ͨ�������w�ڹ��r�µ��w�e�����˜ʠ�B��(0��,һ���˜ʴ�≺,���Q�˛r)���w�e�M�нY���Ӌ��,�������w�M�Мضȡ��������a����
�����������w���W�е����Z������ԭ�t,�������w�����Z����ȕr���w�����ٷֲ����ơ����ʌ����r�µ������ΑB����˶���B�µ������ΑB,��ͨ�^�˶���B���ٶȷֲ��������õ��c���r�������Ę˶�����,������_������Ę˶�����ͨ�^������w��B���������˛r�µ���������ȡ���Ϸ���������ǰ���ᵽ�ĺ���G(ƒ) ����ژ˶���B�µõ�,��0��,-���˜ʴ�≺�Ę˶���B���^�y�õ�,��˲����˃ɲ�����ķ�����
�������c���r�����Ę˶���B�µ����u�l���w������
�������ڴ˷����ǻ������Z������ԭ���M�������ģ�����ձ��m���ڸ��N���w�ڷǘ˶���B�µ�������
5�����������F
5.1Ӳ���·�Č��F .
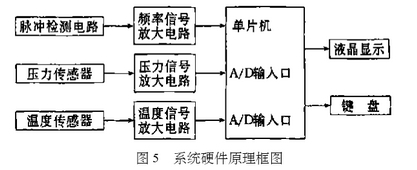
����������ķ�����֪Ҫ��Ɍ��ǘ˶���B���w���������Z������,��Ҫ�ɼ����w�Ĝضȡ�������̖,ͬ�r������ɏ��s�������㷨,��̖̎�����ֲ������Ԇ�Ƭ�C����ĵ����ܻ�ϵ�y�OӋ����Ƭ�C��Mi-crochip��˾��PIC16F877�� 16F877����8 K��FLASH����惦��,368�ֹ���RAM��256�ֹ���E2PROM���@����s�㷨�Č��F�ʹ��������Ĵ惦�ṩ�����û��A��16F877 ����Ƭ�ȵ�AD�D����,���Ժ����·�OӋ,�܉���c�ضȡ������z�y�Ŵ�늣�·�B��,�����·�ľo�����OӋ,���ͳɱ���Ƭ�ϵ�WATCHDOG���Ա��C����Ŀɿ��\�С�����PICI6F877�Ķ˿�B�����ƽ׃���Д�Ĺ���,�˹��ܿ��Է���Č��F���ε��I�P�ӿ��·���D5��ϵ�yӲ��ԭ����D��
�������˝M��x���F���@ʾ(��늳ع��)����Ҫ,�x���ڂ������x����·�OӋ�϶��w�F�˵��ĵ��� �c��
5.1.1�ضșz�y�·
�����ضȂ������x���˜ضȂ�����,ԓ�ضȂ������ǻ��ڰ댧�w�y��ԭ���Ƴɵġ�ԓ���������̷����^��(-40~125�� ;ݔ��늉���̖,���Ŵ����Է����ͬ��Ƭ�C��A/D�ӿ��B��;�����̷��������^�õľ��Զ�,10 mV/ C;�����^��,�����̷����ȿ��_±0.5 ��;�w�e�^С,���b��ʽ��H��3�����_��T0-92,���Է�����c�u������Ӌ�ı��w���B��
5.1.2�����z�y�·
�����������������É���ʽ�������������b�ڲ��P��⚤��,���P�ĤƬ������ͨ�^���͂��f����������оƬ���ϏĶ���.���ɱ����ľ���ݔ����
����ԓ�����������m�����е͉����y���������^�ߵľ��Ⱥ;��Զ�,�܉F��λУ�ʺ͜ض��a�������е������ԡ�
��������ԓ�����������鉺��ʽ,��������Դ��늡����˽���ϵ�y�Ĺ���,ʹ�����gЪ��늵ķ���,����Ҫ�M��A/D���Õr�Žo�����������ͺ���Դ��늡�������������ݔ����̖ͨ�^�p���·�õ�������,���Ŵ��A/D�ɘӡ�
5.2ܛ���Č��F
�������ܻ�ϵ�y��ܛ���OӋ�Y��PIC��Ƭ�C�����c������PIC�ąR���Z��,���ÅR���Z�Ա������ϵ�yЧ��,�s�̳�����Еr�g,����ϵ�y���ġ�
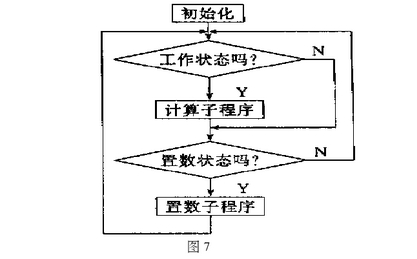
�������˱���ܛ���OӋ,������֞鹤����B���Ô���B�������侎�Ʋ�ͬ���ӳ�������������,ͨ�^��־λ�_����������Ҫ�\�е��ӳ���,��ͬ�Ę�־ͨ�^��ͬ���Д����O��,����:1 s���r�Д����O��Ӌ���־,�ⲿ�Д����O���Ô���־���@�Ӽȱ��C��ϵ�y�Č��r�����w�F��ܛ���ĽY�������c��������B���ڌ�˲�r����Ӌ������Ӌ����@ʾ���D6�o����Ӌ���ӳ�������̈D���Ô���B�������x������ƽ���x��ϵ��`K�����롣�������ڜu������Ӌ��С�����r���ܵ����ĸɔ_,���߀���������������г��Ĺ���,����������Ҳ����ͨ�^�I�P���롣
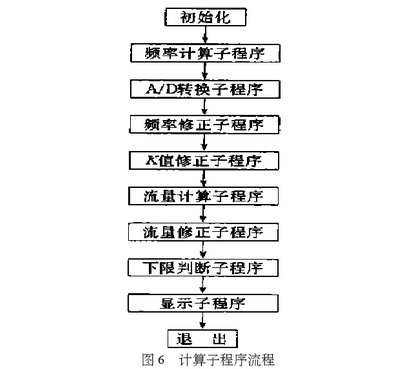
�������������̈D��D7��ʾ��
6�YՓ
������2�o���˘˶���B��,3�_�u����������������ǰ��Ǿ����`��ı��^�Y����
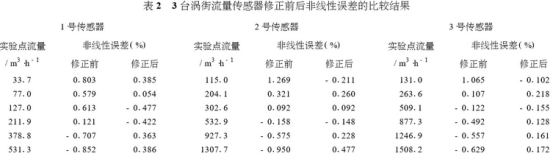
�������ķ����˚��w�u������Ӌ�y���`��a����ԭ��,���o����һ�N�������Z�������ķ���,�øߴκ����M�σx��ϵ��K������������ͨ�^���x��ϵ��K�ķǾ�������,����˜u������Ӌ��Ӌ�����ȡ��Y�ό��H����,ͨ�^���������ضȵ��a���õ����c���r�������˛r�µ�����,�������Ñ���ʹ�á�
���σ���Դ�ھW�j�������֙�ϵ���h��!