ժҪ:�о��˫@ȡ�ܵ�������ɔ_�����ķ�������B�˻��ڼ��ٶȂ������Ĺܵ������̖�IJɼ�.�Y�Ϝu��������̖�ܵ������̖���l�V�����Y��,ָ���˹ܵ������̖�l���c�u������Ӌ��̖����Ҫ�ɔ_�����l��ֱ�����P.�о�����,��ͨ�^�@ȡ�ܵ���Ӽ��ٶ���̖����,���g�ӫ@�Üu��������̖����Ҫ�����l������.�����@һ�о��YՓ,�Թܵ������̖��������Ϣ�酢��ݔ��,��C��ͨ�^���m���V�����u��������̖��������ĞV������.
�����F��u������Ӌ��ʹ��Խ��Խ�V��������������w���������Ӌ,�ʌ���Ӹɔ_�@�÷dz�����.��Ӹɔ_��Ӱ표u�֜y������Ҫ�ɔ_֮-��,������ČW�ߺ�˾���u������Ӌ����ӆ��}�M���˴������о�21,������Rosemount��˾��8800A'31��F+P��˾��VT/VR�͞����[4].
�������о��ī@ȡ�ܵ�������ɔ_�����ķ�������,�����ó��˹ܵ������̖�l���c�u��������̖����Ҫ�ɔ_�����l��ֱ�����P,�о���һ�N���ڼ��ٶȂ������Ĺܵ������̖�ɼ��͌��������m���V������.
1�Cе�ܵ���ӌ��u������Ӌ��̖��Ӱ�
������1�Dz�ͬ���w���������^�̸ɔ_��������Ӱ푳̶ȵĽyӋ[5].���С�++����ʾ������(�x���`��10%�����),"+����ʾ����(�x���`��1%),��ʾ������(�x���`��С��1%)
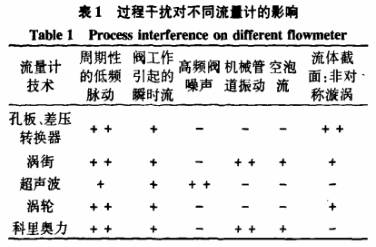
�����ı�1�п��Ե�֪,�u�������y���иɔ_Ӱ푴�ijɷ֞�Cе�ܵ���Ӹɔ_�������Եĵ��l�}�Ӹɔ_.
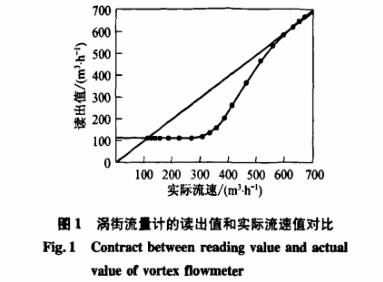
����ӑՓ���ڼ��ٶȞ�1g,��ֱ����l�ʞ�100Hz������ڔ_���u������Ӌ��̖ݔ����Ӱ�,��D1��ʾ�ڛ]�����ٵ���r��,�u�ւ������z�y���ܵ����,���e�`�Д�100Hz��������̖,����e�`���@ʾ��120m'/h������.
2�u��������̖�c�ܵ������̖����ϵ��ԇ����
������Ӹɔ_����Ҫ�ĸɔ_�ɷ�֮һ.��Ҫ������̖�ɷ�����һ--�M�з��x,Ŀǰ���ü�����ķ��������l�V����[78].���x���l�V������,�����������X���Д�����Ч�^�e������͜u����̖���l�ʡ������ֲ��IJ�ͬ.Ȼ���ڌ��H���̑�����,��������������̖�������t�ھ����l�V�����mȻ���Էֱ�������ķ�ֵ,���o����Ч�^�������ķ�ֵ����̖��߀�Ǹɔ_��,��˿��ܕ���ۙ���e�`����Ӹɔ_��..
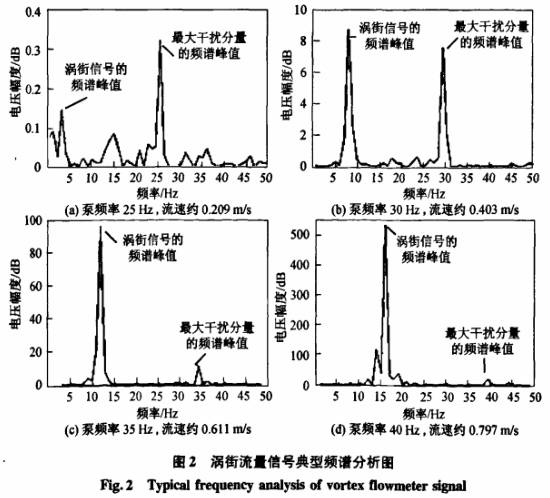
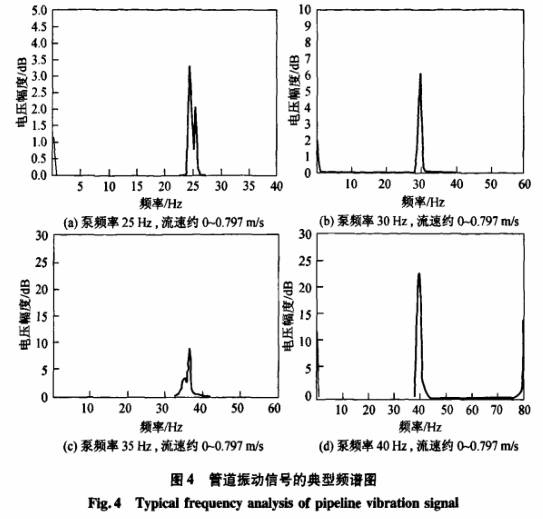
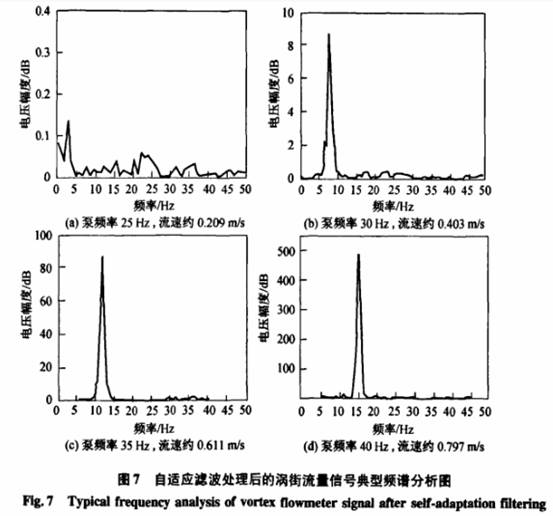
�������о�����ͬ���ٺͱ��l�ʽM���µĜu��������̖�M���˔����ɼ����l�V����,����ˮ�ò��ø��m��AP12.40�μ���ˮ��,�քe�{�����ټs0.209,0.403,0.611,0.797m/s.����ˮ���ٵĴ�С����ÿһ�_����,�ٷքe�O��ˮ�ù����l�ʞ�25,30,35,40Hz,��ݔ�˲�ͬ����Ӹɔ_��̖,��D2��ʾ.��Ҋ������С�r�������ӽ��������ڌ��H��̖����,�ھ����l�V�������y�Д�..
�������]���ܵ����������Ӹɔ_ֱ�ӵ�����푑�,�����|���ܵ��r,���@�����X�쵽�ܵ���Ҏ�ɵ����.�������Ϸ���,�Y����Ӝy��֪�R�����о��J����ԇLԇ���˼��ٶȂ��������ɼ��ܵ���ӵ���̖[910.
����ԇ���,���ٶȂ��������xȡ�^����Ҫ.���о����ٶȂ�����ԇ��x��������ADI��˾��ADXL202,�@��-�N�ͳɱ������ġ��������յ��p�S���ٶȂ�����,��y��������+2g.
������ԇ�ʹ��A/D�����ɼ���,��ADXL202��ģ�Mݔ����̖�D�Q�锵����̖����PC�C�M��̎��������Labwindows/cvi�y��ƽ�_��PC�C�܉�،��F�����ɼ�.
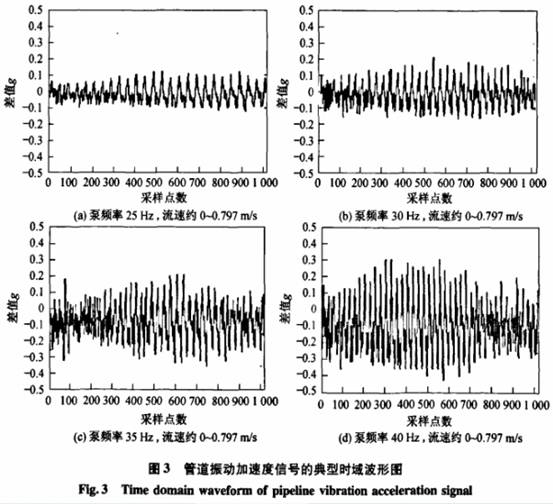
����ԇ����B:�քe�{�����ټs��0,0.209,0.403,0.611,0.797m/s,����ˮ���ٵĴ�С������ÿ--�_����,�ٷքe�O��ˮ�ù����l�ʞ�25,30,35,40Hz.���ٶȂ�������ģ�Mݔ����̖ݔ�˵�PC�C��A/D�ɼ���,�ɘ��l��1000Hz.����ͬ���ٺͱ��l�ʽM���µĹܵ������̖�M�Д����ɼ����l�V����.�D3�����нM����,�ɘӵõ��Ĺܵ���Ӽ��ٶ���̖�ĵ��͕r���ΈD.�D�ЙM���˞�ɘӵ��c��,��1024�c;�v���˞�������Og�˶�ֵ�IJ�ֵ���v���˻���ֵ0������0g�Ę˶�ֵ.�D4��ʾ�錦���Ĺܵ������̖�ĵ����l�V�D.
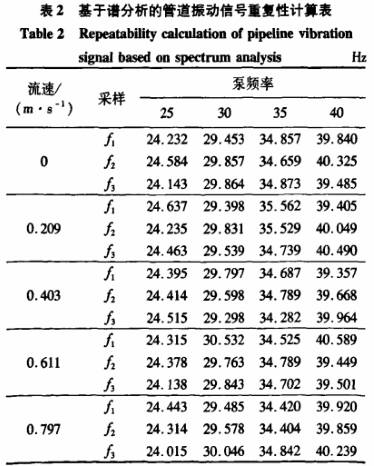
����������C���ɼ������̖�Ƿ�����؏���,���о���ÿ�N���r�½M�ϵĹܵ������̖�քe�M����3���؏Ͳɘ�,ÿ��1024�c,�ɘ��l��1000Hz.��2�Ǹ��Δ��������õ����l��ֵ.
�����ɱ�2�Ĕ������Կ���,�ܵ���ӵĔ����l�V�����õ�������l��ֵ�؏��Ժܸ�.
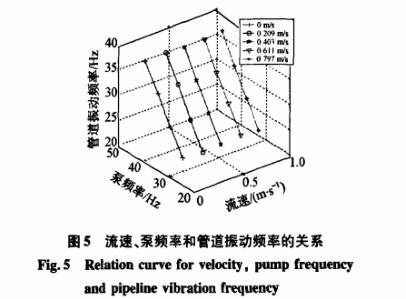
��������2���؏��Ԕ���Ӌ��ƽ��ֵ,����ƽ��ֵ���������١����l�ʺܵ�����l�ʵ��Pϵ����,��D5��ʾ.�����Y������,��Փԇ��b�ù��r���,�ܵ������̖���l�ʺ�����ֻ�c�ù����l�����P,���l��Խ�t�����̖���l�ʺ�����Խ��.
3���ܵ�������m���V����ԇ�
����ͨ�^���Ϸ������Եó��YՓ,ˮ�ù�������Ĺܵ���Ӹɔ_ֱ����ϵ��˜u��ݔ����̖��.ԇ���@ʾ,�ڸ��N���Ӡ�B��,�u����̖�е��ӵ�ǧ�_�l���c�ܵ����ٶ�����l�ʽ��������,���cԇ��õ�ˮ�ù����l�����.
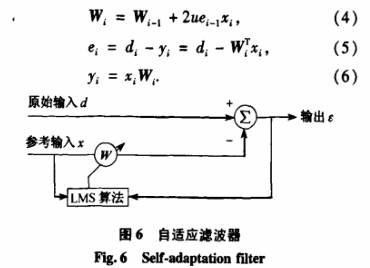
����ͨ�^���ٶȂ������@����Ч�Ĺܵ�����l�ʺ�,���Ԍ�֮��ͬ��u��������̖����Ҫ�ɔ_��̖���l��.���о�����Թܵ������̖������ݔ�˞酢����̖,�������m��С�����`��(LMS)���֞V��������,�팦�u��������̖��Ӹɔ_�M��̎��11.LMS�V����ݔ����

����ʽ�У�W��V������ϵ���M�ɵ�����,X��O�yֵ�M�ɵ�����.
����LMS�㷨�Ļ���˼�������Ã��������е����½���.�����ƌ�,�ɵÙ�ϵ���ĵ�����ʽ��

����ʽ��,u�����m��ϵ��,ȡֵ��СӰ푵��Ք��ٶȡ���Ӌֵ�ķ�����㷨�ķ�����.�`��e;�ĵ���Ӌ�㹫ʽ��

������ʽ(2)����ϵ��W(t+1),�S����������ݔ��,�����؏�ʹ��ʽ(2)��ʽ(3)�M�е���,ʹW��uڅ����W��.
�����O�ɼ��@�õĜu��������̖��ԭʼ��̖,����ݔ�˞�ɼ��@�õĹܵ���Ӽ��ٶ���̖,�V����ϵ�y��D6��ʾ.
�������������m���V�������㷨,�ɵõ�ϵ��W;��Ӌ��ֵ��
�����O��uֵ,ͨ�^ʽ(4)~(6)��ѭ�h����,ʹW;��uڅ����W.
������ǰ����,u�����LMS�㷨�Ք��ٶȺͷ����Ե�ϵ��,uֵ�^����܌��°lɢ,�^С�ֿ���ʹ�Ք��ٶ�׃��.���о�ͨ�^������Ӌ��,���������ͱ��^,ʹ��ӽ���ֵ.ͨ�^ԇ�Ӌ��,�_��u=0.1.
�����D7��V�������̖�l��D.�ĈD�п��Կ�������Ҫ�Ĺܵ���Ӹɔ_�ѽ����������V�������̖�������ߺܶ�..
4�Y���Z
�������о���������ԇ��b���ό�һ���֜u�ւ������M��ԇ��.�M�ܲ�ͬ�Ĺܵ��������������,���ܵ���ӆ��}Ҳ��һ-�����ձ���.���о�ͨ�^���ڼ��ٶȂ������Ĺܵ������̖�IJɼ����l�V����,ָ���˹ܵ������̖�l���c�u��������̖����Ҫ�ɔ_�����l��ֱ�����P.���������m���V������,��C�ˌ��u������Ӌ������V������Ч��,������������ṩ��һ�N��Ч��;��ֵ��ע�����,���о���Ҫᘌ���Q�Աõĸɔ_�����Ĺܵ���������}�����ڽ�Q������һ��Ҏ�ɵĹܵ������Ҳ���m����.���о��м��ٶȂ������İ��bλ�����P��Ҫ,��Ӱ������̖�ęz�y�Լ����u����̖�V��̎���ĽY��.
���σ���Դ�ھW�j�������֙�ϵ���h��!